co je servomotor?
servomotor je typ motoru, který se může otáčet s velkou přesností. Obvykle se tento typ motoru skládá z řídicího obvodu, který poskytuje zpětnou vazbu o aktuální poloze hřídele motoru, tato zpětná vazba umožňuje otáčení servomotorů s velkou přesností. Pokud chcete objekt otáčet v určitých úhlech nebo vzdálenosti, použijte servomotor. Je tvořen jednoduchým motorem, který prochází servo mechanismem., Pokud je motor napájen stejnosměrným napájením, nazývá se to stejnosměrný servomotor, a pokud je to střídavý motor, nazývá se to střídavý servomotor. Pro tento tutoriál budeme diskutovat pouze o práci stejnosměrného servomotoru. Kromě těchto hlavních klasifikací existuje mnoho dalších typů servomotorů založených na typu uspořádání převodových stupňů a provozních charakteristikách. Servomotor obvykle přichází s uspořádáním převodovek, které nám umožňuje získat velmi vysoký točivý moment servomotor v malých a lehkých obalech., Díky těmto vlastnostem se používají v mnoha aplikacích, jako je autíčko, RC vrtulníky a letadla, Robotika atd.
servomotory jsou hodnoceny v kg / cm (kilogram na centimetr) většina hobby servomotorů je hodnocena na 3kg/cm nebo 6kg/cm nebo 12kg/cm. Tento kg / cm vám řekne, jak velkou váhu může váš servomotor zvednout v určité vzdálenosti. Například: 6 kg/cm Servo motor by měl být schopen zvednout 6kg, pokud je břemeno zavěšené 1cm od motorů, hřídele, čím větší je vzdálenost, tím menší hmotnosti nosnost., O poloze servomotoru rozhoduje elektrický puls a jeho obvody jsou umístěny vedle motoru.
Servo Motor Pracovní Mechanismus
skládá se ze tří částí:
- Kontrolované zařízení
- Výstup čidla
- systém Zpětné vazby
je To uzavřený systém, kde využívá pozitivní zpětnou vazbu systém pro řízení pohybu a konečnou polohu hřídele. Zde je zařízení řízeno zpětnovazebním signálem generovaným porovnáním výstupního signálu a referenčního vstupního signálu.,
zde je referenční vstupní signál porovnán s referenčním výstupním signálem a třetí signál je produkován systémem zpětné vazby. A tento třetí signál působí jako vstupní signál k ovládání zařízení. Tento signál je přítomen, pokud je generován signál zpětné vazby nebo existuje rozdíl mezi referenčním vstupním signálem a referenčním výstupním signálem. Hlavním úkolem servomechanismu je tedy udržovat výstup systému na požadované hodnotě za přítomnosti zvuků.,
Servo Pracovní Princip
servo se skládá z Motoru (DC nebo AC), potenciometr, soukolí a kontrolního obvodu. Nejprve používáme převodovou sestavu ke snížení otáček a ke zvýšení točivého momentu motoru. Řekněme, že v počáteční poloze hřídele servomotoru je poloha knoflíku potenciometru taková, že na výstupním portu potenciometru není generován žádný elektrický signál. Nyní je elektrický signál dán jinému vstupnímu terminálu zesilovače detektoru chyb., Nyní se rozdíl mezi těmito dvěma signály, jeden pochází z potenciometru a další pochází z jiných zdrojů, budou zpracovány v mechanismu zpětné vazby a výstup bude poskytnuta, pokud jde o chyby signálu. Tento chybový signál působí jako vstup pro motor a motor se začne otáčet. Nyní je hřídel motoru spojen s potenciometrem a jak se motor otáčí, potenciometr a bude generovat signál. Takže jak se změní úhlová poloha potenciometru, změní se signál výstupní zpětné vazby., Po nějaké době se pozice potenciometru dostane do polohy, že výstup potenciometru je stejný jako externí signál. V tomto stavu, tam bude žádný výstup signálu ze zesilovače do motoru vstup, jak tam je žádný rozdíl mezi vnější aplikován signál a signál generovaný na potenciometr, a v této situaci, motor se přestane otáčet.
propojení servomotorů s mikrokontroléry:
propojení hobby servomotorů, jako je servomotor S90 s MCU, je velmi snadné. Serva mají tři dráty vycházející z nich., Z toho dva budou použity pro napájení (pozitivní a negativní) a jeden bude použit pro signál, který má být odeslán z MCU. Mg995 kovová převodovka servomotor, který se nejčastěji používá pro RC auta humanoidní roboty atd. Obrázek MG995 je uveden níže:

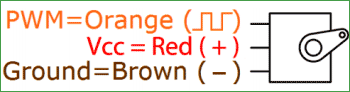
barevné kódování servomotoru se může lišit, proto zkontrolujte příslušný datový list.,
Všechny servomotory pracují přímo s +5V koleje, ale musíme být opatrní na množství proudu motoru by konzumovat, pokud plánujete používat více než dva servomotory správné servo shield by měl být navržen.
ovládání servomotoru:
všechny motory mají tři dráty vycházející z nich. Z toho dva budou použity pro napájení (pozitivní a negativní) a jeden bude použit pro signál, který má být odeslán z MCU.
servomotor je řízen PWM (Pulse s modulací), který je zajištěn řídicími vodiči., Existuje minimální puls, maximální puls a opakovací frekvence. Servomotor se může otočit o 90 stupňů z obou směrů a vytvořit neutrální polohu. Servomotor očekává, že uvidí puls každých 20 milisekund (ms) a délka pulsu určí, jak daleko se motor otáčí. Například, 1,5 ms pulz bude motor otočit do polohy 90°, jako když puls je kratší než 1,5 ms hřídel se pohybuje na 0° a pokud je delší než 1,5 ms, než se otočit servo o 180°.,
servomotor pracuje na principu PWM (Pulse width modulation), což znamená, že jeho úhel natočení je řízen trváním aplikovaného impulsu na jeho řídicí kolík. V podstatě servomotor je tvořen stejnosměrným motorem, který je řízen proměnným odporem (potenciometrem) a některými ozubenými koly. Vysokorychlostní síla stejnosměrného motoru se převádí na točivý moment ozubenými koly. Víme, že WORK= Force X Vzdálenost, v stejnosměrném motoru síla je menší a vzdálenost (rychlost) je vysoká a v Servo, síla je vysoká a vzdálenost je menší., Potenciometr je připojen k výstupnímu hřídeli Servo, pro výpočet úhlu a zastavení stejnosměrného motoru v požadovaném úhlu.

servomotor lze otáčet z 0 na 180 stupňů, ale v závislosti na výrobě může dosáhnout až 210 stupňů. Tento stupeň rotace může být řízen použitím elektrického impulsu správné šířky na jeho řídicí kolík. Servo kontroluje puls každých 20 milisekund. Puls 1 ms (1 milisekunda) šířka může otáčet servo na 0 stupňů, 1.,5ms se může otáčet na 90 stupňů (neutrální poloha) a 2 ms puls může otočit na 180 stupňů.
Všechny servomotory pracují přímo s +5V koleje, ale musíme být opatrní, o množství proudu motoru by konzumovat, pokud plánujete používat více než dva servomotory správné servo shield by měl být navržen.,
dozvědět Se více o tom, servo pracovní princip a praktické použití, prosím, zkontrolujte níže aplikací, kde je ovládání servomotoru je vysvětleno s příklady:
- Servo tester obvodu
- Servo motor propojení s 8051 microcontroller
- Servo řízení motorů pomocí Arduino
- Servo řízení s Arduino Due
- Servo Řízení s Flex Senzor
- Raspberry Pi Servo Motor Tutorial