Hvad er en servomotor?
en servomotor er en type motor, der kan rotere med stor præcision. Normalt består denne type motor af et styrekredsløb, der giver feedback om motorakslens aktuelle position, denne feedback gør det muligt for servomotorerne at rotere med stor præcision. Hvis du vil rotere et objekt i nogle bestemte vinkler eller afstand, bruger du en servomotor. Det består netop af en simpel motor, der løber gennem en servomekanisme., Hvis motoren drives af en DC – strømforsyning, kaldes den DC-servomotor, og hvis den er AC-drevet motor, kaldes den AC-servomotor. Til denne tutorial diskuterer vi kun om DC-servomotoren. Bortset fra disse store klassifikationer er der mange andre typer servomotorer baseret på typen af geararrangement og driftsegenskaber. En servomotor leveres normalt med et geararrangement, der giver os mulighed for at få en meget højt drejningsmoment servomotor i små og lette pakker., På grund af disse funktioner bruges de i mange applikationer som legetøjsbil, RC-helikoptere og fly, robotik osv.
servomotorer er normeret i kg/cm (kilogram per centimeter) de fleste hobby servomotorer er normeret til 3 kg/cm eller 6 kg/cm eller 12 kg / cm. Denne kg / cm fortæller dig, hvor meget vægt din servomotor kan løfte i en bestemt afstand. For eksempel: en 6 kg/cm servomotor skal være i stand til at løfte 6 kg, hvis belastningen suspenderes 1 cm væk fra motorakslen, jo større afstanden er, desto mindre er vægtbæreevnen., Placeringen af en servomotor bestemmes af elektrisk puls, og dens kredsløb er placeret ved siden af motoren.
Servo Motor Arbejder Mekanisme
Den består af tre dele:
- Kontrolleret enhed
- Output sensor
- Feedback system
Det er et lukket system, hvor det bruger et positivt feedback-system til at styre bevægelse og den endelige position af akslen. Her styres enheden af et feedback signal genereret ved at sammenligne udgangssignal og reference indgangssignal.,
Her sammenlignes referenceindgangssignalet med referenceudgangssignalet, og det tredje signal frembringes af feedbacksystemet. Og dette tredje signal fungerer som et indgangssignal til styringen af enheden. Dette signal er til stede, så længe feedbacksignalet genereres, eller der er en forskel mellem referenceindgangssignalet og referenceudgangssignalet. Så servomekanismens hovedopgave er at opretholde udgangen af et system til den ønskede værdi ved tilstedeværelse af lyde.,
servomotor arbejdsprincip
en servo består af en Motor (DC eller AC), et potentiometer, gear samling, og en kontrollerende kredsløb. Først og fremmest bruger vi gearmontering til at reducere omdrejningstallet og for at øge motorens drejningsmoment. Sig ved startposition af servomotorakslen, er potentiometerknappens position sådan, at der ikke genereres noget elektrisk signal ved potentiometerets udgangsport. Nu gives et elektrisk signal til en anden indgangsterminal på fejldetektorforstærkeren., Nu er forskellen mellem disse to signaler, man kommer fra potentiometer og en anden kommer fra andre kilder, vil blive behandlet i en feedback-mekanisme og output vil blive leveret i form af fejl signal. Dette fejlsignal fungerer som input til motor og motor begynder at rotere. Nu er motorakslen forbundet med potentiometeret, og når motoren roterer, så potentiometeret, og det vil generere et signal. Så som potentiometer vinkelposition ændringer, dens output feedback signal ændringer., Efter engang når potentiometerets position i en position, at potentiometerets udgang er den samme som det eksterne signal, der leveres. Ved denne tilstand vil der ikke være noget udgangssignal fra forstærkeren til motorindgangen, da der ikke er nogen forskel mellem eksternt påført signal og signalet genereret ved potentiometer, og i denne situation stopper motoren med at rotere.
interface servomotorer med mikrocontrollere:
interface hobby servomotorer som S90 servomotor med MCU er meget let. Servoer har tre ledninger, der kommer ud af dem., Hvoraf to vil blive brugt til levering (positiv og negativ), og en vil blive brugt til det signal, der skal sendes fra MCU. En Mg995 Metal Gear servomotor, der er mest almindeligt anvendt til RC biler humanoid bots etc. Billedet af MG995 er vist nedenfor:

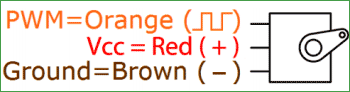
farvekodningen af din servomotor kan variere, og kontroller derfor for dit respektive datablad.,
alle servomotorer arbejder direkte med dine +5V forsyningsskinner, men vi skal være forsigtige med mængden af strøm, som motoren vil forbruge, hvis du planlægger at bruge mere end to servomotorer, skal der designes et korrekt servoskærm.
styring af servomotor:
alle motorer har tre ledninger, der kommer ud af dem. Hvoraf to vil blive brugt til levering (positiv og negativ), og en vil blive brugt til det signal, der skal sendes fra MCU.
servomotoren styres af P .m (puls med Modulation), som leveres af styretrådene., Der er en minimal puls, en maksimal puls og en gentagelseshastighed. Servomotor kan dreje 90 grader fra begge retninger danner sin neutrale position. Servomotoren forventer at se en puls hver 20 millisekunder (ms), og pulsens længde bestemmer, hvor langt motoren drejer. For eksempel vil en 1,5 ms puls gøre motoren dreje til 90 position position, såsom hvis pulsen er kortere end 1,5 ms aksel bevæger sig til 0.og hvis det er længere end 1,5 ms end det vil dreje servo til 180..,
servomotor arbejder på p .m (Pulse widthidth modulation) princip, betyder dens rotationsvinkel styres af varigheden af anvendt puls til sin styrestift. Dybest set servomotor består af DC motor, som styres af en variabel modstand (potentiometer) og nogle Gear. HØJHASTIGHEDSKRAFT af DC-motor omdannes til drejningsmoment Med Gear. Vi ved, at arbejde= kraft DISTANCE Afstand, i DC motorkraft er mindre og afstand (hastighed) er høj og i Servo, kraft er høj og afstand er mindre., Potentiometeret er forbundet til servoens udgangsaksel for at beregne vinklen og stoppe DC-motoren i den ønskede vinkel.

servomotor kan drejes fra 0 til 180 grader, men den kan gå op til 210 grader afhængigt af fremstillingen. Denne grad af rotation kan styres ved at anvende den elektriske puls af korrekt bredde til dens styrestift. Servo kontrollerer pulsen i hver 20 millisekunder. Pulsen på 1 ms (1 millisekund) bredde kan rotere servoen til 0 grader, 1.,5ms kan rotere til 90 grader (neutral position) og 2 ms puls kan rotere det til 180 grader.
alle servomotorer arbejder direkte med dine +5V forsyningsskinner, men vi skal være forsigtige med mængden af strøm, som motoren vil forbruge, hvis du planlægger at bruge mere end to servomotorer, skal der designes et korrekt servoskærm.,
for At lære mere om servomotor, der arbejder princip og praktisk anvender, tjek venligst nedenstående applikationer, hvor styring af servomotor er forklaret med eksempler:
- Servo motor tester kredsløb
- Servomotor samspil med 8051 mikrocontroller
- Servo motor-kontrol ved hjælp af Arduino
- Servo kontrol med Arduino Skyldes
- Servo Kontrol med Flex Sensor
- Raspberry Pi Servomotor Tutorial