
Wie bei den meisten modernen Automobilen hat das einfache Getriebe, das als Differential bekannt ist, ständig verfeinert und experimentiert – was zu einer Reihe von Typen mit jeweils eigenen Vor-und Nachteilen führte.
Das Konzept des Differentials – das heißt, Räder, die auf derselben Achse montiert sind, unabhängig voneinander drehen zu lassen – ist ein altes Design, wobei die erste bekannte Instanz seiner Verwendung in China während des 1.Jahrtausends v. Chr.,
Obwohl dies lange vor der Erfindung des Automobils war, litten Karren, Wagen und Wagen immer noch unter dem gleichen Problem, dass ein Rad in Kurven rutschte oder zog, den Verschleiß erhöhte und Straßen beschädigte.
Das Aufkommen von Motoren, die Vorder-oder Hinterräder antreiben, um ein Fahrzeug anzutreiben, anstatt sie nur über Pferde zu ziehen, fügte ein neues zu überwindendes Problem hinzu – wie man eine unabhängige Rotation zulässt und gleichzeitig beide Räder antreiben kann.
Die frühesten Autos haben es nicht versucht, sie haben einfach nur ein Rad auf einer unabhängigen Achse angetrieben., Dies war jedoch alles andere als ideal, da sie unterfordert waren und häufig Probleme mit der Traktion auf etwas anderem als festem, ebenem Boden hatten.
Schließlich führte dies zur Entwicklung des offenen Differentials, bevor andere kompliziertere Typen entwickelt wurden, um komplexere Fahrbedingungen zu überwinden.,
Sehen Sie sich dieses Video an, in dem mit 3D-Bildern erklärt wird, wie die folgenden Arten von Differentialen funktionieren:
Offenes Differential:
Ein Differential in seiner grundlegendsten Form besteht aus zwei Hälften einer Achse mit einem Zahnrad an jedem Ende, das durch einen dritten Gang verbunden ist und drei Seiten eines Quadrats bildet. Dies wird normalerweise durch einen vierten Gang für zusätzliche Stärke ergänzt, der das Quadrat vervollständigt.,
Diese Grundeinheit wird dann weiter ergänzt, indem dem Differentialgehäuse ein Ringgetriebe hinzugefügt wird, das die Grundkernräder hält – und dieses Ringgetriebe ermöglicht die Stromversorgung der Räder durch Verbindung mit der Antriebswelle über ein Ritzel.
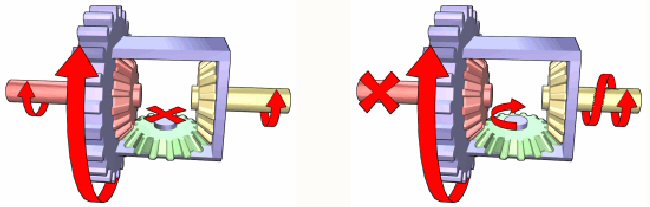
In diesem Beispiel sehen Sie die drei Seiten des internen Getriebes, aus denen der Kernmechanismus besteht, wobei das größere blaue Zahnrad das Ringgetriebe darstellt, das mit der Antriebswelle verbunden wäre., Das linke Bild zeigt das Differential mit beiden Rädern, die sich mit der gleichen Geschwindigkeit drehen, während das rechte Bild zeigt, wie die inneren Gänge einrasten, wenn sich ein Rad langsamer als das andere dreht.
Diese Getriebeanordnung bildet das offene Differential und ist die häufigste Art von Automobildifferenzial, von dem kompliziertere Systeme abgeleitet werden.,
Der Vorteil dieses Typs beschränkt sich größtenteils auf die Grundfunktion eines Differentials wie zuvor beschrieben, wobei der Schwerpunkt in erster Linie darauf liegt, dass sich die Achse effektiver drehen kann, indem das Rad an der Außenseite der Kurve schneller bewegt als das Innenrad, da es mehr Boden bedeckt. Es profitiert auch davon, dass sein grundlegendes Design relativ billig zu produzieren ist.,
Der Nachteil dieses Typs besteht darin, dass, da das Drehmoment gleichmäßig zwischen beiden Rädern aufgeteilt wird, die Kraftmenge, die durch die Räder übertragen werden kann, durch das Rad mit der geringsten Griffigkeit begrenzt wird.
Sobald die Traktionsgrenze beider Räder zusammen erreicht ist, beginnt sich das Rad mit der geringsten Traktion zu drehen – und reduziert diese Grenze noch weiter, da der Widerstand des bereits sich drehenden Rades noch geringer ist.,
Lesen Sie unseren Blog über Turbos, Kompressor und Saugmotoren
Sperrdifferential:
Das Sperrdifferential ist eine Variante, die bei einigen Fahrzeugen zu finden ist, vor allem bei Fahrzeugen, die im Gelände unterwegs sind. Es ist im Wesentlichen ein offenes Differential mit der Fähigkeit, an Ort und Stelle verriegelt zu werden, um eine feste Achse anstelle einer unabhängigen Achse zu erzeugen. Dies kann je nach Technik im Fahrzeug manuell oder elektronisch geschehen.
Der Vorteil eines gesperrten Differentials ist, dass es in der Lage ist, eine wesentlich größere Menge an Traktion als ein offenes Differential zu gewinnen., Da das Drehmoment nicht gleichmäßig 50/50 geteilt ist, kann es mehr Drehmoment auf das Rad leiten, das die bessere Traktion hat – und ist nicht durch die geringere Traktion des anderen Rades zu einem bestimmten Zeitpunkt begrenzt.
Da es unwahrscheinlich ist, dass Sie mit hoher Geschwindigkeit unterwegs sind und normalerweise über unebenem Boden fahren, ist das Problem des Luftwiderstands und des Verschleißes der Reifen um Ecken an einer festen Achse weniger problematisch.,
Ein Nachteil von gesperrten Diffs wird Bindung genannt, die auftritt, wenn überschüssige Drehenergie (Drehmoment) innerhalb des Antriebsstrangs aufgebaut wird und freigegeben werden muss – typischerweise erreicht durch die Räder, die den Boden verlassen, um die Position zurückzusetzen. Oder indem Sie die Schlösser einfach loslassen, sobald sie nicht mehr benötigt werden.
Stellen Sie sich ein langes Papprohr vor, das an jedem Ende gehalten wird, und drehen Sie das Rohr dann in entgegengesetzte Richtungen, bis das Rohr der Kraft nicht mehr standhält und sich faltet und reißt – das ist bindend., Dies geschieht, weil sich die Räder mit unterschiedlichen Geschwindigkeiten bewegen, was die Achsen verdreht und einen erhöhten Druck auf die Gänge ausübt – aber die Belastung der Räder und ihre erhöhte Traktion reichen aus, um ein Verrutschen der Reifen zu verhindern, um den Druck abzubauen.
Geschweißtes / Spulendifferential:
Geschweißte Differentiale sind im Wesentlichen die gleichen wie ein gesperrtes Differential, nur wurde es dauerhaft von einem offenen Differential in eine feste Achse verschweißt (auch als Spulendiffer bekannt).,) Dies geschieht in der Regel nur unter bestimmten Umständen, wenn die Eigenschaften der verriegelten Diff / festen Achse, die es einfacher machen, beide Räder gleichzeitig zu drehen, wünschenswert sind-zum Beispiel in Autos, die zum Treiben bestimmt sind.
Es wird normalerweise nicht empfohlen, da die Hitze durch Schweißen die Festigkeit der Komponenten beeinträchtigen und das Risiko eines katastrophalen Teilefehlers erhöhen kann – was möglicherweise sogar dazu führt, dass die gebrochenen Differentialgetriebe durch das Diff-Gehäuse explodieren und eine Gefahr für andere darstellen Verkehrsteilnehmer und Fußgänger.,
Sperrdifferential:
LSD arbeitet daran, die Vorteile offener und gesperrter Differentiale durch ein komplizierteres System zu kombinieren. Es gibt zwei Kategorien, die unterschiedliche Formen des Widerstands verwenden, um den gleichen Effekt zu erzielen:
Mechanische Kupplung LSD:
Diese Art von LSD umgibt das gleiche Kerngetriebe, das im offenen Diff zu sehen ist, mit einem Paar von Druckringen, die Kraft auf zwei Sätze von Kupplungsscheiben ausüben, die neben den Zahnrädern positioniert sind., Dies bietet Widerstand gegen die unabhängige Drehung der Räder, die die Wirkung des Differentials von offen nach gesperrt verändert – und bietet ihm die erhöhte Traktion, von der dieser Typ gegenüber einem offenen Differential profitiert.
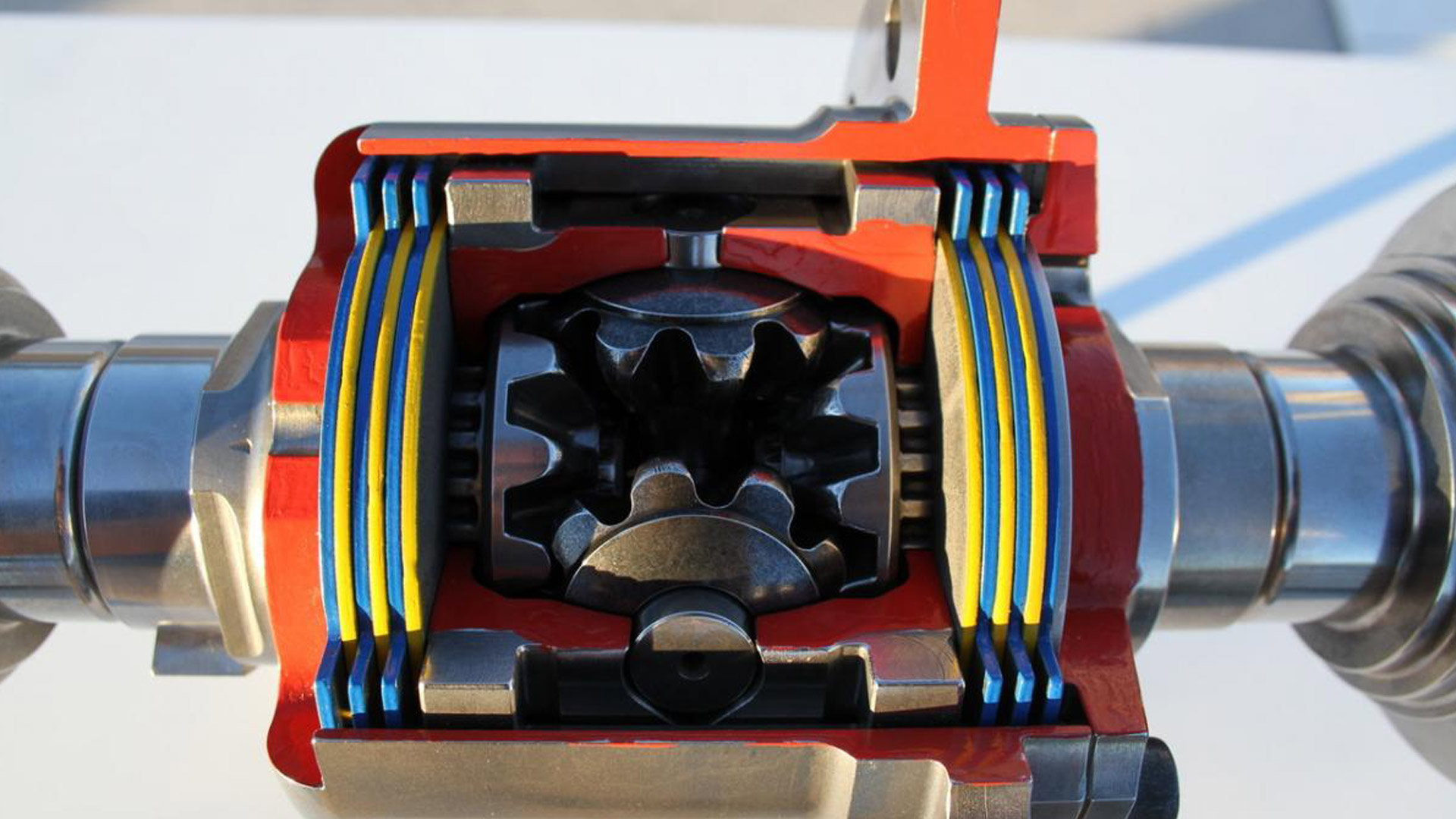
In diesem Ausschnitt sehen Sie die die Kernräder umgebenden (ebenfalls abgeschnittenen) Druckringe, die von den zentralen Zahnradstiften, die unter Rotation gegen die abgewinkelten Flächen gedrückt werden, auseinandergedrückt werden., Diese Bewegung drückt die Druckringe auf die Kupplungspakete (gelb und blau) auf beiden Seiten, erzeugt Widerstand und verändert das Verhalten der Achse von einer offenen zu einer festen Art von Wirkung.
Mechanische KUPPLUNGSLSD ‚ s werden ebenfalls weiter in Subtypen aufgeteilt, die sich etwas anders verhalten und sich verändern, wenn der Druck auf die Kupplungsscheiben und Druckringe ausgeübt wird:
- Bei einem Einweg-LSD wird der Druck nur unter Beschleunigung ausgeübt., Dies bedeutet, dass sich der Diff in Kurven und abseits der Kraft als offener Typ verhält, der es ihnen ermöglicht, sich unabhängig zu drehen – aber unter Beschleunigung erzeugt die erzwungene Drehung des Differentials Reibung in den Kupplungsscheiben und verriegelt sie an Ort und Stelle, um mehr Traktion zu erhalten.
- Ein Zwei-Wege-LSD geht noch einen Schritt weiter und übt auch unter Verzögerung Druck auf die Kupplungsscheiben aus, um die Stabilität beim Bremsen auf variablen Straßenoberflächen zu verbessern.,
- Der eineinhalbjährige versucht erneut, das Beste aus beiden Subtypen zu kombinieren, indem er bei Beschleunigung einen größeren Druck und bei Verzögerung einen geringeren Druck ausübt.
Der Nachteil mechanischer LSDs ist, dass sie regelmäßig gewartet werden müssen, um betriebsbereit zu bleiben, und dazu neigen, sich vollständig abzunutzen, was zu einem teuren Austausch von Teilen führt.
Viskoses LSD:
Bei der zweiten Art von Sperrdifferenzial verwenden sie anstelle von Kupplungen eine dicke Flüssigkeit, um den Widerstand zu erzeugen, der erforderlich ist, um das Differentialverhalten zwischen offen und verriegelt zu ändern., Aufgrund der geringeren beweglichen Teile als ein mechanischer LSD sind VLSD einfacher, haben aber auch eine größere Auswahl an Vor-und Nachteilen im Vergleich.
In ihrer Grundbedienung ist der Effekt in der Anwendung glatter als bei mechanischen LSDs, da sich der Widerstand im Einklang mit der Geschwindigkeit aufbaut, mit der die Räder im Vergleich zum Differentialgehäuse fahren – was zu einer sehr allmählichen Zunahme führt.
VLSDs können das Drehmoment auch effektiver auf das Rad lenken, das mehr Traktion hat., Da das Fluid unter der Geschwindigkeit widerstandsfähig wirkt, erzeugt der Geschwindigkeitsunterschied zwischen den beiden Rädern im Differential mehr Widerstand auf dem sich langsamer bewegenden Rad, wenn ein Rad jemals die Traktion verliert und sich dreht – und leitet mehr Drehmoment von der Antriebswelle zu ihm.
VLSDs werden bei längerem Gebrauch weniger wirksam, da sich die Flüssigkeit erwärmt, weniger Viskose wird und weniger Widerstand bietet. Es kann auch nicht so vollständig verriegeln wie ein mechanisches LSD, da ein Fluid keinen absoluten Widerstand innerhalb eines angemessenen Raums bieten kann.,
Ein Nachteil sowohl bei mechanischen als auch bei viskosen LSDs besteht darin, dass das System das Drehmoment bei Kurvenfahrten mit hoher Geschwindigkeit nicht immer effektiv kanalisiert, da es das sich schneller bewegende Außenrad als Traktionsverlust interpretieren kann. Es lenkt dann das Drehmoment auf das innere Rad und erzeugt im entgegengesetzten Moment, wenn es benötigt wird, ein Über – /Untersteuern.
Torsen Differential:
Die Torsen (Drehmoment – Sensing) differential verwendet die verwendung von einige clevere getriebe zu produzieren die gleiche wirkung wie eine begrenzte Slip Differential ohne die notwendigkeit für kupplungen oder flüssigkeit widerstand.,
Dies wird erreicht, indem dem herkömmlichen Getriebe eines offenen Differentials eine Schicht Schneckengetriebe hinzugefügt wird. Diese Sätze von Schneckengetrieben, die auf jede Achse wirken, liefern den Widerstand, der erforderlich ist, um eine Drehmomentübertragung zu ermöglichen, was dann erreicht wird, indem die Schneckengetriebe über verbundene Stirnräder in konstantem Verhältnis zueinander stehen.
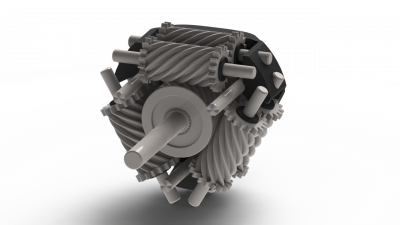
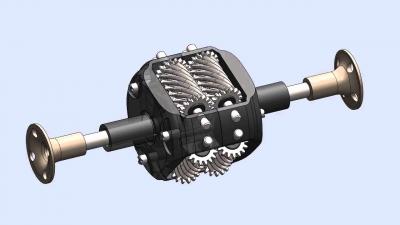
 Das erste und zweite Bild zeigen die drei Paare von Schneckengetrieben, die mit jeder Hälfte der Achse verbunden sind – wobei die Stirnräder am Ende jeder Schnecke die Paare verbinden., Es ist diese Verbindung, die das Drehmoment von einem Rad auf das andere überträgt, sobald sich eine Achse schneller als die andere dreht. Während das erste und das zweite Bild vom ursprünglichen Torsen-Design sind, ist das dritte Bild von der zweiten Version des Torsen-Differentials. Das neuere Design hat die Worms-Zahnräder so positioniert, dass sie inline mit Achsen sind, aber immer noch die gleiche mechanische Wirkung haben. Jedes Schneckengetriebe ist immer noch in Kontakt mit seinem Paar, und nur eine Seite der Achse mit Räumen im Getriebe, die das Netz mit der anderen Seite entfernen.,
Das erste und zweite Bild zeigen die drei Paare von Schneckengetrieben, die mit jeder Hälfte der Achse verbunden sind – wobei die Stirnräder am Ende jeder Schnecke die Paare verbinden., Es ist diese Verbindung, die das Drehmoment von einem Rad auf das andere überträgt, sobald sich eine Achse schneller als die andere dreht. Während das erste und das zweite Bild vom ursprünglichen Torsen-Design sind, ist das dritte Bild von der zweiten Version des Torsen-Differentials. Das neuere Design hat die Worms-Zahnräder so positioniert, dass sie inline mit Achsen sind, aber immer noch die gleiche mechanische Wirkung haben. Jedes Schneckengetriebe ist immer noch in Kontakt mit seinem Paar, und nur eine Seite der Achse mit Räumen im Getriebe, die das Netz mit der anderen Seite entfernen.,
Das konstante Netz zwischen den beiden Seiten des Differentials hat den zusätzlichen Vorteil, dass das Drehmoment sofort übertragen wird, wodurch es extrem auf sich ändernde Straßen-und Fahrbedingungen reagiert.
Während ein offenes Differential sein Drehmoment immer 50/50 zwischen jedem Rad aufteilen muss, kann das Torsen-Differential je nach Verhältnis der Zahnräder einen größeren Prozentsatz des Drehmoments durch ein Rad lenken., Dadurch wird die Leistungsbegrenzung aufgehoben, unter der offene Differentiale leiden, da die Menge des verfügbaren Drehmoments nicht durch die Menge begrenzt wird Traktion in beiden Rädern.
Des Weiteren kann das Getriebe auch so bearbeitet werden, dass beim Beschleunigen und Abbremsen auf die gleiche Weise ein anderthalbfaches Sperrdifferential ein anderes Widerstandsverhältnis vermittelt wird.,
Dies alles wird mechanisch erreicht, ohne dass die Verwendung von Elektronik oder verderblichen Teilen für Reibung geopfert wird, und insgesamt ist das Torsen-Differential das überlegene mechanische System, das die Hauptvorteile aller zuvor aufgeführten Differentialtypen kombiniert.,
Lesen Sie unseren Blog über Doppelkupplungsgetriebe und wie sie funktionieren
Aktives Differential:
Das aktive Differential ist einem Sperrdifferential sehr ähnlich und verwendet immer noch Mechanismen, um den Widerstand bereitzustellen, der erforderlich ist, um das Drehmoment von einer Seite auf die andere zu übertragen – aber anstatt sich auf rein mechanische Kraft zu verlassen, können diese Kupplungen elektronisch aktiviert werden.
Das aktive Differential kann mithilfe der Elektronik die mechanischen Kräfte, die das System durch sich ändernde Fahrbedingungen erfährt, künstlich verändern., Dies macht sie steuerbar und somit programmierbar, und durch den Einsatz einer Reihe von Sensoren im gesamten Fahrzeug kann ein Computer automatisch erkennen, welche Antriebsräder Strom zu und wann leiten.
Dies verbessert die Leistung drastisch, insbesondere über unvollkommenen Straßenoberflächen, und wird besonders von Rallyefahrern bevorzugt, deren Autos sich schnell ändernde Fahrbedingungen aushalten und ein System benötigen, das mit ihren kontinuierlichen Anpassungen am Fahrzeug Schritt halten kann.,
Torque Vectoring Differential:
Der TVD bringt dieses elektronisch verbesserte System noch weiter, indem er es verwendet, um den Winkel oder Vektor des Fahrzeugs in und aus den Kurven zu manipulieren, indem bestimmte Räder ermutigt werden, in Schlüsselmomenten mehr Drehmoment zu erhalten – was die Kurvenleistung verbessert.
Durch Aktivieren der entgegengesetzten Kupplung zu dem, was ein rein mechanisch angetriebener LSD normalerweise einrasten würde, können Sie den Effekt nutzen, um die Lenkung zu unterstützen und gleichzeitig mehr Leistung zu reduzieren und die Mängel im LSD-System zu überwinden.,
Beim Einfahren in die Kurve übt ein Mehrweg-LSD Widerstand gegen beide Räder aus, um die Achse zumindest teilweise zu verriegeln und beim Bremsen zu stabilisieren – was dann bei abnehmender Raddrehzahl und beim Einbiegen des Fahrzeugs gelöst wird, sodass sich die Räder mit unterschiedlichen Geschwindigkeiten drehen können .
Anstatt den Widerstand an beiden Rädern zu lösen, aktiviert ein TVD jedoch weiterhin nur die Kupplung am Außenrad – wodurch der Widerstand dieses Rades erhöht und das System mehr Drehmoment durchlässt., Dieses Ungleichgewicht der Kraft nach außen ermutigt das Fahrzeug, schärfer in die Ecke zu fahren und Untersteuern zu reduzieren.
Wenn Sie diesen Widerstand weiterhin durch die Ecke ausüben, überschreibt das Fahrzeug, wenn es die Spitze passiert und zu beschleunigen beginnt, weiterhin einen normalen Mehrweg-LSD -, der das sich schneller bewegende Außenrad erneut interpretieren würde Rutschen und Drehmoment beim Beschleunigen auf das Innenrad umleiten, was es als mehr Grip empfindet.,
Da der TVD mehr Widerstand auf die Außenkupplung der Räder ausübt, wird das System dazu gebracht, mehr Drehmoment durch die Kupplung umzuleiten-die anzuwendende Leistung zu erhöhen und das Untersteuern bei Beschleunigung aus einer Ecke zu reduzieren.
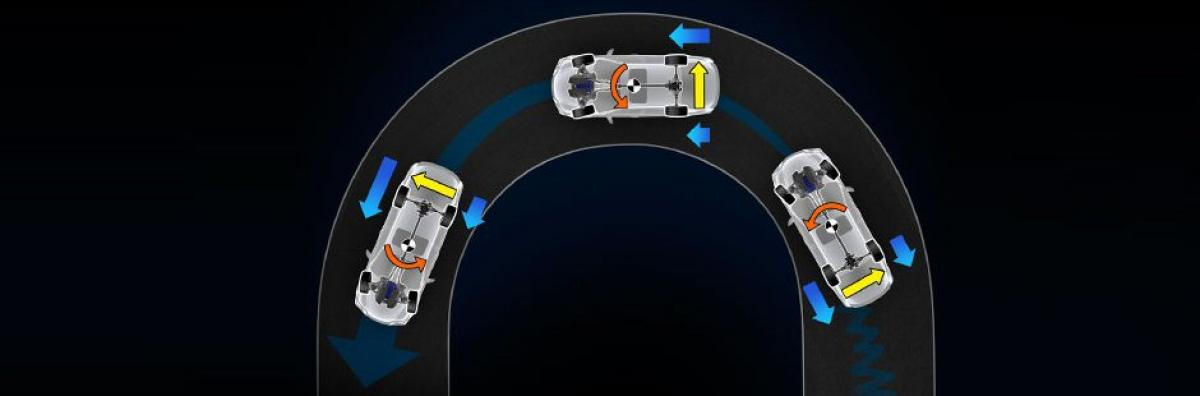 Der gelbe Pfeil hebt die durch die Ecke auftretende Drehmomentübertragung hervor, die durch den künstlichen Widerstand erzeugt wird, den der TVD auf das Außenrad ausübt. Dies ermöglicht eine größere Beschleunigung aus der Kurve, während die Drehfähigkeit des Autos erhöht wird.,
Der gelbe Pfeil hebt die durch die Ecke auftretende Drehmomentübertragung hervor, die durch den künstlichen Widerstand erzeugt wird, den der TVD auf das Außenrad ausübt. Dies ermöglicht eine größere Beschleunigung aus der Kurve, während die Drehfähigkeit des Autos erhöht wird.,
Ein Torque Vectoring Differential ist in der Lage, 100% des verfügbaren Drehmoments durch ein einzelnes Rad zu kanalisieren, wenn es unter extremsten Umständen benötigt wird.
Der Nachteil des Systems ist, dass es sehr kompliziert und sehr teuer ist und aufgrund seines Kurvenpotentials mit hoher Geschwindigkeit normalerweise nur für Renn – /Streckenanwendungen verwendet wird.
Jedes System hat seine Vor-und Nachteile, und obwohl die komplizierteren Systeme im Allgemeinen überlegen sind, haben sie einen Kostenaufwand, der die einfacheren Systeme weit übertrifft.,
Wie bei allem Automobil, wie viel Nutzen Sie von jedem System zu gewinnen kommt darauf an, was genau Sie mit Ihrem Fahrzeug zu tun und was Sie brauchen, um Ihr Differential in der Lage zu sein. Wenn Sie den örtlichen Supermarkt besuchen, benötigen Sie kein Drehmomentvektorierungsdifferential, es sei denn, Sie haben Lust auf die nächste WRC und können sich die Bußgelder leisten – aber Sie möchten möglicherweise ein Sperrdifferential, wenn Sie zufällig in einer ländlichen Gegend leben, auf die ein Geländewagen besser zugreifen kann.