¿qué es un servomotor?
un servomotor es un tipo de motor que puede girar con gran precisión. Normalmente este tipo de motor consiste en un circuito de control que proporciona retroalimentación sobre la posición actual del eje del motor, esta retroalimentación permite que los servomotores giren con gran precisión. Si desea rotar un objeto en algunos ángulos o distancias específicas, utilice un servomotor. Se compone simplemente de un motor simple que funciona a través de un mecanismo servo., Si el motor es alimentado por una fuente de alimentación de CC, entonces se llama servomotor de CC, y si es un motor alimentado por CA, entonces se llama servomotor de CA. Para este tutorial, discutiremos solo sobre el funcionamiento del servomotor de CC. Aparte de estas clasificaciones principales, hay muchos otros tipos de servomotores basados en el tipo de disposición del engranaje y las características de funcionamiento. Un servomotor generalmente viene con una disposición de engranajes que nos permite obtener un servomotor de par muy alto en paquetes pequeños y livianos., Debido a estas características, se están utilizando en muchas aplicaciones como automóviles de juguete, helicópteros y aviones RC, robótica, etc.
los servomotores están clasificados en kg / cm (kilogramo por centímetro) la mayoría de los servomotores hobby están clasificados en 3kg/cm o 6kg/cm o 12kg/cm. Este kg / cm le dice cuánto peso puede levantar su servomotor a una distancia particular. Por ejemplo: un servomotor de 6 kg / cm debe ser capaz de levantar 6 kg si la carga está suspendida a 1 cm del eje del motor, cuanto mayor sea la distancia, menor será la capacidad de carga del peso., La posición de un servomotor se decide por pulso eléctrico y su circuito se coloca al lado del motor.
mecanismo de trabajo del servomotor
consta de tres partes:
- dispositivo controlado
- Sensor de salida
- Sistema de retroalimentación
es un sistema de circuito cerrado donde utiliza un sistema de retroalimentación positiva para controlar el movimiento y la posición final del eje. Aquí el dispositivo es controlado por una señal de retroalimentación generada comparando la señal de salida y la señal de entrada de referencia.,
Aquí la señal de entrada de referencia se compara con la señal de salida de referencia y la tercera señal es producida por el sistema de retroalimentación. Y esta tercera señal actúa como una señal de entrada para el control del dispositivo. Esta señal está presente siempre y cuando se genere la señal de retroalimentación o haya una diferencia entre la señal de entrada de referencia y la señal de salida de referencia. Por lo tanto, la tarea principal del servomecanismo es mantener la salida de un sistema en el valor deseado en presencia de ruidos.,
principio de funcionamiento del servomotor
un servo consiste en un Motor (CC o ca), un potenciómetro, un conjunto de engranajes y un circuito de control. En primer lugar, utilizamos el conjunto de engranajes para reducir las RPM y aumentar el par del motor. Digamos que en la posición inicial del eje del servomotor, la posición de la perilla del potenciómetro es tal que no hay señal eléctrica generada en el puerto de salida del potenciómetro. Ahora se da una señal eléctrica a otro terminal de entrada del amplificador detector de errores., Ahora la diferencia entre estas dos señales, una proviene del potenciómetro y otra proviene de otras fuentes, se procesará en un mecanismo de retroalimentación y la salida se proporcionará en términos de señal de error. Esta señal de error actúa como la entrada para el motor y el motor comienza a girar. Ahora el eje del motor está conectado con el potenciómetro y a medida que el motor gira, el potenciómetro generará una señal. Así como la posición angular del potenciómetro Cambia, su señal de retroalimentación de salida cambia., Después de algún tiempo, la posición del potenciómetro alcanza una posición en la que la salida del potenciómetro es la misma que la señal externa proporcionada. En esta condición, no habrá señal de salida del amplificador a la entrada del motor, ya que no hay diferencia entre la señal aplicada externa y la señal generada en el potenciómetro, y en esta situación el motor deja de girar.
interfaz de servomotores con microcontroladores:
interfaz de servomotores hobby como el servomotor S90 con MCU es muy fácil. Los Servos tienen tres cables saliendo de ellos., De los cuales dos se utilizarán para el suministro (positivo y negativo) y uno se utilizará para la señal que se enviará desde el MCU. Un motor servo del engranaje del metal MG995 que es el más de uso general para los robots humanoides etc. de los coches de RC. La imagen de MG995 se muestra a continuación:

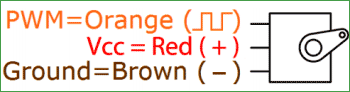
la codificación de colores de su servomotor puede diferir, por lo tanto, verifique su hoja de datos respectiva.,
Todos los servomotores funcionan directamente con sus rieles de suministro de +5V, pero tenemos que tener cuidado con la cantidad de corriente que consumiría el motor si planea usar más de dos servomotores, debe diseñarse un servo shield adecuado.
servomotor de control:
todos los motores tienen tres cables que salen de ellos. De los cuales dos se utilizarán para el suministro (positivo y negativo) y uno se utilizará para la señal que se enviará desde el MCU.
El servomotor está controlado por PWM (pulso con modulación) que es proporcionado por los cables de control., Hay un pulso mínimo, un pulso máximo y una tasa de repetición. El servomotor puede girar 90 grados desde cualquier dirección desde su posición neutral. El servomotor espera ver un pulso cada 20 milisegundos (ms) y la longitud del pulso determinará cuánto gira el motor. Por ejemplo, un pulso de 1.5 ms hará que el motor gire a la posición de 90°, como si el pulso es más corto que 1.5 ms el eje se mueve a 0° y si es más largo que 1.5 ms, girará el servo a 180°.,
El servomotor funciona según el principio PWM (modulación de ancho de pulso), lo que significa que su ángulo de rotación está controlado por la duración del pulso aplicado a su PIN de Control. Básicamente el servomotor se compone de un motor de CC que está controlado por una resistencia variable (potenciómetro) y algunos engranajes. La fuerza de alta velocidad del motor de CC se convierte en par por engranajes. Sabemos que el trabajo = Fuerza X distancia, en la fuerza del motor de CC es menor y la distancia (velocidad) es alta y en el Servo, la fuerza es alta y la distancia es menor., El potenciómetro está conectado al eje de salida del Servo, para calcular el ángulo y detener el motor de CC en el ángulo requerido.

Servo motor se puede girar de 0 a 180 grados, pero puede ir hasta 210 grados, dependiendo de la fabricación. Este grado de rotación se puede controlar aplicando el pulso eléctrico de la anchura apropiada, a su perno de Control. El Servo comprueba el pulso cada 20 milisegundos. El pulso de 1 ms (1 milisegundo) de ancho puede girar el servo a 0 grados, 1.,5 ms pueden girar a 90 grados (posición neutral) y el pulso de 2 ms puede girarlo a 180 grados.
Todos los servomotores funcionan directamente con sus rieles de suministro de +5V, pero tenemos que tener cuidado con la cantidad de corriente que consumiría el motor si planea usar más de dos servomotores, debe diseñarse un servo shield adecuado.,
para obtener más información sobre el principio de funcionamiento del servomotor y los usos prácticos, consulte las siguientes aplicaciones donde se explica el control del servomotor con los ejemplos:
- circuito de probador de servomotor
- interfaz de servomotor con microcontrolador 8051
- Control de servomotor con Arduino
- servocontrol con Arduino Due
- servocontrol con Sensor Flex
- tutorial de servomotor Raspberry Pi