Qu’est-ce qu’un servomoteur?
un servomoteur est un type de moteur qui peut tourner avec une grande précision. Normalement, ce type de moteur se compose d’un circuit de commande qui fournit un retour sur la position actuelle de l’arbre du moteur, ce retour permet aux servomoteurs de tourner avec une grande précision. Si vous souhaitez faire pivoter un objet à des angles ou à une distance spécifiques, vous utilisez un servomoteur. Il est juste composé d’un simple moteur qui passe par un mécanisme d’asservissement., Si le moteur est alimenté par une alimentation en courant continu, il est appelé servomoteur à COURANT CONTINU, et s’il s’agit d’un moteur à courant alternatif, il s’appelle servomoteur à COURANT ALTERNATIF. Pour ce tutoriel, nous discuterons uniquement du fonctionnement du Servomoteur CC. En dehors de ces principales classifications, il existe de nombreux autres types de servomoteurs basés sur le type de disposition des engrenages et les caractéristiques de fonctionnement. Un servomoteur est généralement livré avec un agencement d’engrenages qui nous permet d’obtenir un servomoteur à couple très élevé dans des emballages petits et légers., En raison de ces caractéristiques, ils sont utilisés dans de nombreuses applications telles que les voitures jouets, les hélicoptères et les avions RC, La robotique, etc.
Les servomoteurs sont évalués en kg/cm (Kilogramme par centimètre) la plupart des servomoteurs hobby sont évalués à 3 kg/cm ou 6 kg/cm ou 12 kg / cm. Ce kg / cm vous indique le poids que votre servomoteur peut soulever à une distance particulière. Par exemple: un servomoteur de 6 kg/cm devrait pouvoir soulever 6 kg si la charge est suspendue à 1 cm de l’arbre du moteur, plus la distance est grande, plus la capacité de charge est faible., La position d’un servomoteur est déterminée par impulsion électrique et ses circuits sont placés à côté du moteur.
mécanisme de fonctionnement du servomoteur
il se compose de trois parties:
- dispositif contrôlé
- capteur de sortie
- Système de rétroaction
c’est un système en boucle fermée où il utilise un système de rétroaction positive pour contrôler le mouvement et la position finale Ici, le dispositif est contrôlé par un signal de rétroaction généré en comparant le signal de sortie et le signal d’entrée de référence.,
ici, le signal d’entrée de référence est comparé au signal de sortie de référence et le troisième signal est produit par le système de rétroaction. Et ce troisième signal agit comme un signal d’entrée pour le contrôle de l’appareil. Ce signal est présent tant que le signal de rétroaction est généré ou qu’il existe une différence entre le signal d’entrée de référence et le signal de sortie de référence. Ainsi, la tâche principale du servomécanisme est de maintenir la sortie d’un système à la valeur souhaitée en présence de bruits.,
principe de fonctionnement du servomoteur
un servomoteur se compose d’un moteur (CC ou CA), d’un potentiomètre, d’un ensemble d’engrenages et d’un circuit de commande. Tout d’abord, nous utilisons un ensemble d’engrenages pour réduire le régime et augmenter le couple du moteur. Disons qu’à la position initiale de l’arbre du servomoteur, la position du bouton du potentiomètre est telle qu’il n’y a pas de signal électrique généré à l’orifice de sortie du potentiomètre. Maintenant, un signal électrique est donnée à l’autre borne d’entrée de l’erreur amplificateur., Maintenant la différence entre ces deux signaux, l’un vient du potentiomètre et l’autre provient d’autres sources, seront traitées dans un mécanisme de rétroaction et de sortie sera fourni en termes de signal d’erreur. Ce signal d’erreur agit comme l’entrée pour le moteur et le moteur commence à tourner. Maintenant, l’arbre du moteur est connecté au potentiomètre et lorsque le moteur tourne, le potentiomètre génère un signal. Ainsi, à mesure que la position angulaire du potentiomètre change, son signal de rétroaction de sortie change., Après un certain temps, la position du potentiomètre atteint une position que la sortie du potentiomètre est la même que le signal externe fourni. À cette condition, il n’y aura pas de signal de sortie de l’amplificateur à l’entrée du moteur car il n’y a pas de différence entre le signal appliqué externe et le signal généré au potentiomètre, et dans cette situation, le moteur cesse de tourner.
interfaçage des servomoteurs avec des microcontrôleurs:
interfaçage des servomoteurs hobby comme le servomoteur s90 avec MCU est très facile. Les Servos ont trois fils qui sortent d’eux., Dont deux seront utilisés pour L’approvisionnement (positif et négatif) et un sera utilisé pour le signal qui doit être envoyé du MCU. Un MG995 Metal Gear Servo Moteur qui est le plus couramment utilisé pour RC voitures robots humanoïdes etc. L’image de MG995 est indiqué ci-dessous:

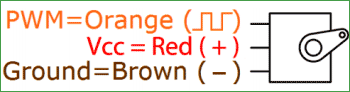
Le code couleur de votre servo-moteur peut varier aussi, vérifiez pour votre feuille de données.,
Tous les servomoteurs fonctionnent directement avec vos rails d’alimentation +5V, mais nous devons faire attention à la quantité de courant que le moteur consommerait si vous prévoyez d’utiliser plus de deux servomoteurs, un bouclier servo approprié doit être conçu.
Servomoteur de commande:
tous les moteurs ont trois fils qui en sortent. Dont deux seront utilisés pour L’approvisionnement (positif et négatif) et un sera utilisé pour le signal qui doit être envoyé du MCU.
Le servomoteur est commandé par PWM (impulsion avec Modulation) qui est fourni par les fils de commande., Il y a une impulsion minimale, une impulsion maximale et un taux de répétition. Le servomoteur peut tourner à 90 degrés de l’une ou l’autre direction forme sa position neutre. Le servomoteur s’attend à voir une impulsion toutes les 20 millisecondes (ms) et la longueur de l’impulsion déterminera la distance de rotation du moteur. Par exemple, une impulsion de 1,5 ms fera tourner le moteur à la position 90°, par exemple si l’impulsion est inférieure à 1,5 ms, l’arbre se déplace à 0° et s’il est supérieur à 1,5 ms, il tournera le servo à 180°.,
Le servomoteur fonctionne sur le principe PWM (Pulse width modulation), signifie que son angle de rotation est contrôlé par la durée de l’impulsion appliquée à sa broche de commande. Fondamentalement, le servomoteur est composé d’un moteur À COURANT CONTINU contrôlé par une résistance variable (potentiomètre) et quelques engrenages. La force à grande vitesse du Moteur À COURANT CONTINU est convertie en couple par des engrenages. Nous savons que la distance de travail = FORCE X, dans la Force du Moteur À COURANT CONTINU est inférieure et la distance (vitesse) est élevée et dans le Servo, la force est élevée et la distance est inférieure., Le potentiomètre est connecté à l’arbre de sortie du Servo, pour calculer l’angle et arrêter le Moteur À COURANT CONTINU sur l’angle requis.

Le servomoteur peut être tourné de 0 à 180 degrés, mais il peut aller jusqu’à 210 degrés, selon la fabrication. Ce degré de rotation peut être contrôlé en appliquant l’impulsion électrique de largeur appropriée, à sa broche de commande. Servo vérifie l’impulsion toutes les 20 millisecondes. L’impulsion de 1 ms (1 milliseconde) largeur peut tourner le servo à 0 degrés, 1.,5 ms peut tourner à 90 degrés (position neutre) et 2 ms impulsion peut tourner à 180 degrés.
Tous les servomoteurs fonctionnent directement avec vos rails d’alimentation +5V, mais nous devons faire attention à la quantité de courant que le moteur consommerait si vous prévoyez d’utiliser plus de deux servomoteurs, un bouclier servo approprié doit être conçu.,
pour en savoir plus sur le principe de fonctionnement du servomoteur et les utilisations pratiques, veuillez vérifier ci-dessous les applications où le contrôle du servomoteur est expliqué avec les exemples:
- circuit de testeur de servomoteur
- interfaçage du servomoteur avec le microcontrôleur 8051
- contrôle du servomoteur à L’aide D’Arduino