mi a szervomotor?
a szervomotor olyan típusú motor, amely nagy pontossággal foroghat. Általában ez a fajta motor egy vezérlőkörből áll, amely visszajelzést ad a motor tengelyének aktuális helyzetéről, ez a visszacsatolás lehetővé teszi a szervomotorok nagy pontossággal történő forgatását. Ha egy objektumot bizonyos szögben vagy távolságban szeretne elforgatni, akkor szervomotort használ. Ez csak egy egyszerű motorból áll, amely egy szervo mechanizmuson keresztül fut., Ha a motort egyenáramú tápegység táplálja, akkor egyenáramú szervomotornak hívják, ha pedig váltakozó áramú motor, akkor AC szervomotornak hívják. Ehhez a bemutatóhoz csak a DC szervomotor működéséről fogunk beszélni. Ezeken a főbb osztályozásokon kívül számos más típusú szervomotor is létezik, amelyek a fogaskerék elrendezésének és működési jellemzőinek típusán alapulnak. A szervomotor általában jön egy fogaskerék elrendezés, amely lehetővé teszi számunkra, hogy egy nagyon nagy nyomatékú szervomotor kis, könnyű csomagok., Ezeknek a funkcióknak köszönhetően számos alkalmazásban használják őket, mint például játékautó, RC helikopterek, repülőgépek, robotika stb.
a szervomotorok kg/cm-ben (kilogramm / centiméter) vannak besorolva, a legtöbb hobby szervomotor 3kg/cm vagy 6kg/cm vagy 12kg/cm. Ez a kg / cm megmutatja, hogy a szervomotor mekkora súlyt képes felemelni egy adott távolságban. Például: a 6kg / cm Szervomotornak képesnek kell lennie arra, hogy felemelje a 6kg-ot, ha a terhelés 1 cm-re van felfüggesztve a motor tengelyétől, annál nagyobb a távolság, annál kisebb a teherbírás., A szervomotor helyzetét elektromos impulzus határozza meg, áramkörét a motor mellé helyezik.
szervomotor működési mechanizmus
három részből áll:
- vezérelt eszköz
- kimeneti érzékelő
- visszacsatolási rendszer
Ez egy zárt hurkú rendszer, ahol pozitív visszacsatolási rendszert használ a mozgás szabályozására és a tengely végső helyzetére. Itt az eszközt a kimeneti jel és a referencia bemeneti jel összehasonlításával generált visszacsatolási jel vezérli.,
itt a referencia bemeneti jelet összehasonlítjuk a referencia kimeneti jellel, a harmadik jelet pedig a visszacsatoló rendszer állítja elő. Ez a harmadik jel pedig bemeneti jelként működik az eszköz vezérléséhez. Ez a jel mindaddig jelen van, amíg a visszacsatolási jel keletkezik, vagy különbség van a referencia bemeneti jel és a referencia kimeneti jel között. Tehát a szervomechanizmus fő feladata a rendszer kimenetének fenntartása a kívánt értéken zajok jelenlétében.,
szervomotor működési elve
A szervo egy motorból (DC vagy AC), egy potenciométerből, fogaskerék-szerelvényből és egy vezérlő áramkörből áll. Először is, fogaskerék-szerelvényt használunk a fordulatszám csökkentésére, valamint a motor nyomatékának növelésére. Mondjuk a szervomotor tengelyének kezdeti helyzetében a potenciométer gomb helyzete olyan, hogy a potenciométer kimeneti portján nincs elektromos jel. Most egy elektromos jelet adnak a hibadetektor erősítőjének egy másik bemeneti termináljára., Most a két jel közötti különbség, az egyik a potenciométerből származik, a másik pedig más forrásokból származik, visszacsatolási mechanizmusban kerül feldolgozásra, a kimenet pedig a hibajel szempontjából kerül megadásra. Ez a hibajel a motor bemeneteként működik,a motor pedig forog. Most motor tengely csatlakozik a potenciométer, valamint a motor forog, így a potenciométer, majd létrehoz egy jelet. Tehát ahogy a potenciométer szöghelyzete megváltozik, a kimeneti visszacsatolási jel megváltozik., Miután valamikor a helyzet potenciométer eléri olyan helyzetben, hogy a kimeneti potenciométer ugyanaz, mint a külső jel biztosított. Ebben az állapotban nem lesz kimeneti jel az erősítőtől a motor bemenetéig, mivel nincs különbség a külső alkalmazott jel és a potenciométeren generált jel között, ebben a helyzetben a motor leáll.
Szervomotorok összekapcsolása Mikrokontrollerekkel:
a hobbi Szervomotorok, például az S90 szervomotor összekapcsolása az MCU-val nagyon egyszerű. A szervóknak három vezetékük van., Ebből kettőt (pozitív és negatív) szállításra, egyet pedig az MCU-tól küldendő jelre használnak. Egy Mg995 fém fogaskerék szervomotor, amely a leggyakrabban használt RC autók humanoid botok stb. Az MG995 képe az alábbiakban látható:

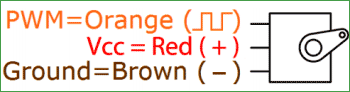
a szervomotor színkódolása eltérhet, így ellenőrizheti a megfelelő adatlapot.,
minden szervomotor közvetlenül működik a +5V tápvezetékekkel, de óvatosnak kell lennünk a motor által fogyasztott áram mennyiségére, ha több mint két szervomotor használatát tervezi, megfelelő szervo pajzsot kell megtervezni.
szervomotor vezérlése:
minden motorból három vezeték jön ki. Ebből kettőt (pozitív és negatív) szállításra, egyet pedig az MCU-tól küldendő jelre használnak.
szervomotor vezérli PWM (impulzus moduláció), amely biztosítja a vezérlő vezetékek., Van egy minimális impulzus, egy maximális impulzus és egy ismétlési sebesség. A szervomotor mindkét irányból 90 fokkal elforgathatja semleges helyzetét. A szervomotor 20 milliszekundumonként (ms) impulzust fog látni, az impulzus hossza pedig meghatározza, hogy a motor milyen messzire fordul. Például egy 1,5 ms-os impulzus a motort 90° – os helyzetbe kapcsolja, például ha az impulzus rövidebb, mint az 1,5 ms tengely 0° – ra mozog, és ha hosszabb, mint 1,5 ms, akkor a szervót 180° – ra fordítja.,
szervomotor működik PWM (impulzus szélesség moduláció) elv, azt jelenti, hogy a forgási szög által vezérelt időtartama alkalmazott impulzus a vezérlő csap. Alapvetően a szervomotor egyenáramú motorból áll, amelyet egy változó ellenállás (potenciométer) és néhány fogaskerék vezérel. Az egyenáramú motor nagy sebességű erejét fogaskerekek alakítják át nyomatékra. Tudjuk, hogy a munka = erő X távolság, DC motor erő kisebb és távolság (sebesség) magas, szervo, erő nagy, távolság kisebb., A potenciométer a szervo kimeneti tengelyéhez van csatlakoztatva, hogy kiszámítsa a szöget, majd állítsa le az egyenáramú motort a kívánt szögben.

szervomotor lehet forgatni 0-180 fok, de lehet menni akár 210 fok, attól függően, hogy a gyártás. Ez a forgási fok szabályozható a megfelelő szélességű elektromos impulzus alkalmazásával a Vezérlőcsapjára. A szervo 20 milliszekundumonként ellenőrzi az impulzust. Az impulzus 1 ms (1 milliszekundum) szélessége lehet forgatni a szervo 0 fok, 1.,5ms lehet forgatni, hogy 90 fok (semleges helyzetben), 2 ms impulzus lehet forgatni, hogy 180 fok.
minden szervomotor közvetlenül működik a +5V tápvezetékekkel, de óvatosnak kell lennünk a motor által fogyasztott áram mennyiségével kapcsolatban, ha több mint két szervomotor használatát tervezi, megfelelő szervo pajzsot kell megtervezni.,
, Hogy többet tudjon meg servo motor működési elve, gyakorlati használ, kérjük, ellenőrizze az alábbi alkalmazások, ahol irányítja a szervomotor magyarázta a példák:
- Szervo motor teszter áramkör
- Szervo motor egyeztet a 8051 mikrokontroller
- Szervo motor vezérlés Arduino
- Szervó vezérlő Arduino Due
- Szervó Vezérlő Flex Érzékelő
- Raspberry Pi Servo Motor Bemutató