Hva er en Servo Motor?
En servo motor er en type motor som kan rotere med stor presisjon. Normalt vil denne type motor som består av en kontroll krets som gir tilbakemelding på det nåværende posisjon på motorakselen, denne tilbakemeldingen kan servomotorer å rotere med stor presisjon. Hvis du vil rotere et objekt på noen bestemte vinkler og avstand, deretter kan du bruke en servo motor. Det er bare består av en enkelt motor som går gjennom en servo mekanisme., Hvis motoren er drevet av en DC strømforsyning, så er det kalt DC servo motor, og hvis det er AC-drevet motor så er det som kalles AC servo motor. For denne opplæringen, vil vi diskutere bare om DC servo motor fungerer. Bortsett fra disse store klassifikasjoner, det er mange andre typer servomotorer basert på type utstyr arrangement og driftsegenskaper. En servo motor kommer vanligvis med et tannhjul ordning som gjør det mulig for oss å få et svært høyt dreiemoment servo motor i små og lette pakker., På grunn av disse funksjonene, kan de brukes i mange programmer som leketøy bil, RC helikopter og fly, Robotics, etc.
servomotorer er vurdert i kg/cm (kilo per centimeter) de fleste hobby servomotorer er vurdert på 3kg/cm eller 6kg/cm eller 12kg/cm. Dette kg/cm forteller deg hvor mye vekten din servo motor som kan løfte på en bestemt avstand. For eksempel: En 6kg/cm Servo motor skal være i stand til å løfte 6kg hvis belastningen er suspendert 1 cm vekk fra motorer aksel, jo større avstand det mindre vekt bæreevne., Plasseringen av en servo motor er besluttet av elektrisk puls og dets kretser er plassert ved siden av motoren.
Servo Motor Fungerende Mekanisme
Den består av tre deler:
- Kontrollert enhet
- Output-sensor
- Tilbakemelding-system
Det er et lukket kretsløp hvor den bruker en positiv tilbakemelding system for å kontrollere bevegelse, og den endelige plasseringen av skaftet. Her enheten styres av en feedback-signalet som genereres ved å sammenligne output signal og referanse inngangssignal.,
Her referanse inngangssignalet er i forhold til referanse-utgangssignal og den tredje signalet er produsert av feedback-system. Og denne tredje signalet fungerer som et inngangssignal til å styre enheten. Dette signalet er til stede så lenge tilbakemeldinger signal genereres eller det er en forskjell mellom referanse inngangssignal og referanse utgangssignal. Så den viktigste oppgaven av servomechanism er å opprettholde produksjonen av et system på ønsket verdi ved tilstedeværelse av lyder.,
Servo Motor Arbeider Prinsippet
En servo består av en Motor (DC eller AC), et potensiometer, utstyr montering og kontroll krets. Først av alt, vi bruker utstyr montering for å redusere RPM og til å øke dreiemomentet på motoren. Si på første posisjon på servo motor aksel, plasseringen av potensiometeret knott er slik at det er ingen elektrisk signal som genereres ved utgang av potensiometeret. Nå et elektrisk signal er gitt til en annen inngang av feil detektor forsterker., Nå forskjellen mellom disse to signaler, kommer fra potensiometeret og en annen kommer fra andre kilder, og vil bli behandlet på en feedback-mekanisme og utgang vil bli gitt i form av feil signal. Dette feil signal fungerer som en inngang for motoren, og motoren begynner å rotere. Nå motorakselen er forbundet med potensiometeret og motoren roterer så potensiometeret og det vil generere et signal. Slik som potensiometeret er kantete posisjon endringer, dens utgang feedback-signalet endres., Etter en stund plasseringen av potensiometer kommer i en posisjon som resultatet av potensiometer er den samme som for ekstern signal er gitt. I denne tilstanden, vil det ikke være utgangssignal fra forsterker til motoren innspill så er det ingen forskjell mellom eksterne applied signal og signal som genereres på potensiometer, og i denne situasjonen motoren stopper å rotere.
Grensesnitt servomotorer med Mikrokontrollere:
Grensesnitt hobby servomotorer som s90 servo motor med MCU er veldig enkelt. Servoer har tre ledninger som kommer ut av dem., Ut hvorav to vil bli brukt til Forsyning (positive og negative) og en som vil bli brukt for signalet som skal være sendt fra MCU. En MG995 Metal Gear Servo Motor som er mest brukt for RC-biler menneskelignende roboter etc. Bildet av MG995 er vist nedenfor:

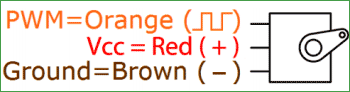
farge-koding av din servo motor kan være ulike, derav sjekk for din respektive dataark.,
Alle servomotorer jobbe direkte med din +5V strømforsyning skinner, men vi må være forsiktig på hvor mye strøm motoren ville konsumere hvis du planlegger å bruke mer enn to servomotorer en skikkelig servo shield bør være utformet.
Controlling-Servo Motor:
Alle motorer har tre ledninger som kommer ut av dem. Ut hvorav to vil bli brukt til Forsyning (positive og negative) og en som vil bli brukt for signalet som skal være sendt fra MCU.
Servo motor er kontrollert av PWM (Pulse med Modulation), som er gitt av kontroll ledninger., Det er et minimum puls, en maksimal puls og en repetisjon pris. Servo motor kan snu 90 grader fra begge retninger danne sin nøytrale posisjon. Servo motor forventer å se en puls hver 20 millisekunder (ms) og lengden av pulsen vil avgjøre hvor langt motoren slås. For eksempel, en 1,5 ms-puls vil gjøre motoren slå til 90° – posisjon, for eksempel hvis pulsen er kortere enn 1,5 ms aksel flytter til 0° og hvis det er lenger enn 1,5 ms enn det vil slå servo til 180°.,
Servo motor fungerer på PWM (Pulse width modulation) prinsippet, betyr det rotasjonsvinkelen er kontrollert av varigheten av anvendt puls til sin Kontroll PIN-kode. I utgangspunktet servo motor er bygd opp av DC-motor som styres av en variabel motstand (potensiometer) og noen tannhjul. Høy hastighet kraft av DC-motor er konvertert til et moment av Tannhjul. Vi vet at ARBEID= KRAFT X AVSTAND, i DC-motor Styrke er mindre og avstand (hastighet) er høy og i Servo, kraft er Høy og avstanden er mindre., Potensiometeret er koblet til output shaft av Servo, for å beregne vinkel og stoppe DC-motor på ønsket vinkel.

Servo motor kan varieres fra 0 til 180 grader, men det kan gå opp til 210 grader, avhengig av produksjon. Denne graden av rotasjon kan kontrolleres ved å bruke den Elektriske Pulsen på riktig bredde, til sin Kontroll pin-kode. Servo sjekker pulsen i hver 20 millisekunder. Pulsen på 1 ms (1 millisekund) bredde kan rotere servo til 0 grader, 1.,5ms kan rotere 90 grader (nøytral stilling) og 2 ms-pulse kan roter det til 180 grader.
Alle servomotorer jobbe direkte med din +5V strømforsyning skinner, men vi må være forsiktig med mengden av gjeldende motoren ville konsumere hvis du planlegger å bruke mer enn to servomotorer en skikkelig servo shield bør være utformet.,
for Å lære mer om servo motor arbeider prinsipp og praktiske bruksområder, vennligst sjekk under programmer hvor styring av servo motor er forklart med eksempler:
- Servo motor tester krets
- Servo motor samspill med 8051 mikrokontroller
- Servo motor kontroll ved hjelp av Arduino
- Servo kontroll med Arduino Due
- Servo Kontroll med Flex-Sensor
- Raspberry Pi Servo Motor Opplæringen