Co to jest silnik serwo?
silnik serwo to rodzaj silnika, który może obracać się z dużą precyzją. Zwykle ten typ silnika składa się z obwodu sterującego, który zapewnia sprzężenie zwrotne na aktualną pozycję wału silnika, to sprzężenie zwrotne pozwala serwosilnikom obracać się z dużą precyzją. Jeśli chcesz obrócić obiekt pod określonym kątem lub odległością, użyj serwomotoru. Składa się tylko z prostego silnika, który przebiega przez mechanizm serwo., Jeśli silnik jest zasilany przez zasilacz PRĄDU STAŁEGO, nazywa się go serwomotorem PRĄDU STAŁEGO, a jeśli jest to silnik zasilany prądem przemiennym, nazywa się go serwomotorem prądu przemiennego. W tym samouczku omówimy tylko działanie silnika serwo DC. Oprócz tych głównych klasyfikacji, istnieje wiele innych typów serwosilników opartych na rodzaju układu przekładni i charakterystyce operacyjnej. Silnik serwo zwykle jest wyposażony w układ zębaty, który pozwala nam uzyskać bardzo wysoki moment obrotowy silnika serwo w małych i lekkich opakowaniach., Ze względu na te cechy są one używane w wielu aplikacjach, takich jak Samochodzik, helikoptery i samoloty RC, Robotyka itp.
serwosilniki są oceniane W kg / cm (kilogram na centymetr) większość serwosilników hobby jest oceniana na 3 kg/cm lub 6 kg/cm lub 12 kg / cm. Ten kg / cm informuje, ile ciężaru może podnieść serwomotor w określonej odległości. Na przykład: serwomotor 6 kg/cm powinien być w stanie podnieść 6 kg, jeśli ładunek jest zawieszony 1 cm od wału silnika, im większa odległość, tym mniejsza nośność ciężaru., O położeniu serwomotoru decyduje impuls elektryczny, a jego obwód jest umieszczony obok silnika.
mechanizm roboczy Silnika Serwo
składa się z trzech części:
- sterowane urządzenie
- czujnik wyjściowy
- system sprzężenia zwrotnego
jest to system w pętli zamkniętej, w którym wykorzystuje system dodatniego sprzężenia zwrotnego do sterowania ruchem i końcową pozycją wału. Tutaj urządzenie jest kontrolowane przez sygnał sprzężenia zwrotnego generowany przez porównanie sygnału wyjściowego i referencyjnego sygnału wejściowego.,
tutaj referencyjny sygnał wejściowy jest porównywany z referencyjnym sygnałem wyjściowym, a trzeci sygnał jest wytwarzany przez układ sprzężenia zwrotnego. I ten trzeci sygnał działa jako sygnał wejściowy do sterowania urządzeniem. Sygnał ten jest obecny tak długo, jak długo generowany jest sygnał sprzężenia zwrotnego lub Istnieje różnica między referencyjnym sygnałem wejściowym a referencyjnym sygnałem wyjściowym. Tak więc głównym zadaniem serwomechanizmu jest utrzymanie wydajności systemu na pożądanej wartości w obecności szumów.,
zasada działania silnika serwo
serwo składa się z silnika (DC lub AC), potencjometru, zespołu przekładni i obwodu sterującego. Przede wszystkim używamy zespołu przekładni do zmniejszenia obrotów i zwiększenia momentu obrotowego silnika. Powiedzmy w początkowej pozycji wału serwomotoru, położenie pokrętła potencjometru jest takie, że nie ma sygnału elektrycznego generowanego na wyjściu potencjometru. Teraz sygnał elektryczny jest podawany do innego terminala wejściowego wzmacniacza detektora błędów., Teraz różnica pomiędzy tymi dwoma sygnałami, jeden pochodzi z potencjometru, a drugi z innych źródeł, będzie przetwarzana w mechanizmie sprzężenia zwrotnego, a wyjście będzie dostarczane w postaci sygnału błędu. Ten sygnał błędu działa jako Wejście dla silnika i silnik zaczyna się obracać. Teraz wał silnika jest połączony z potencjometrem, a gdy silnik obraca się, potencjometr generuje sygnał. Tak więc wraz ze zmianą położenia kątowego potencjometru zmienia się jego wyjściowy sygnał sprzężenia zwrotnego., Po pewnym czasie pozycja potencjometru osiąga pozycję, w której wyjście potencjometru jest takie samo, jak dostarczany sygnał zewnętrzny. W tym stanie nie będzie sygnału wyjściowego ze wzmacniacza na wejście silnika, ponieważ nie ma różnicy między zewnętrznym przyłożonym sygnałem a sygnałem generowanym na potencjometrze, a w tej sytuacji silnik przestaje się obracać.
łączenie serwosilników z mikrokontrolerami:
łączenie serwosilników hobbystycznych, takich jak serwosilnik S90 z MCU, jest bardzo łatwe. Serwomechanizmy mają trzy przewody wychodzące z nich., Z czego dwa zostaną wykorzystane do zasilania (dodatniego i ujemnego), a jeden do sygnału, który ma zostać wysłany z MCU. Silnik serwo z metalową przekładnią MG995, który jest najczęściej używany w samochodach RC humanoidalnych botów itp. Obraz MG995 jest pokazany poniżej:

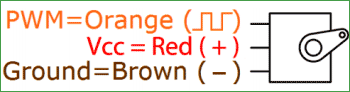
kodowanie kolorów twojego serwomotoru może się różnić, dlatego sprawdź odpowiedni arkusz danych.,
wszystkie serwosilniki współpracują bezpośrednio z szynami zasilającymi +5V, ale musimy uważać na ilość prądu, jaką zużywa silnik, jeśli planujesz użyć więcej niż dwóch serwosilników, należy zaprojektować odpowiednią osłonę serwo.
sterowanie serwomotorem:
wszystkie silniki mają trzy przewody wychodzące z nich. Z czego dwa zostaną wykorzystane do zasilania (dodatniego i ujemnego), a jeden do sygnału, który ma zostać wysłany z MCU.
silnik serwo jest sterowany przez PWM (impuls z modulacją), który jest dostarczany przez przewody sterujące., Jest minimalny puls, maksymalny puls i częstotliwość powtarzania. Serwomotor może obracać się o 90 stopni z dowolnego kierunku w pozycji neutralnej. Serwomotor oczekuje, że co 20 milisekund (ms) zobaczy impuls, a długość impulsu określi, jak daleko silnik się obraca. Na przykład impuls 1,5 ms sprawi, że silnik obróci się w położenie 90°, na przykład, jeśli impuls jest krótszy niż 1,5 ms, wał przesunie się do 0°, a jeśli jest dłuższy niż 1,5 ms, obróci serwo do 180°.,
silnik serwo działa na zasadzie PWM( modulacja szerokości impulsu), oznacza, że jego kąt obrotu jest kontrolowany przez czas trwania przyłożonego impulsu do sworznia sterującego. Zasadniczo silnik serwo składa się z silnika PRĄDU STAŁEGO, który jest sterowany przez zmienny Rezystor (potencjometr) i niektóre przekładnie. Duża siła Prędkości Silnika PRĄDU STAŁEGO jest przekształcana w moment obrotowy za pomocą przekładni. Wiemy, że praca = Siła X odległość, w silniku PRĄDU STAŁEGO siła jest mniejsza ,a odległość (prędkość) jest wysoka, a w Serwo siła jest wysoka, a odległość jest mniejsza., Potencjometr jest podłączony do wału wyjściowego serwo, aby obliczyć kąt i zatrzymać silnik PRĄDU STAŁEGO pod wymaganym kątem.

Silnik Serwo można obracać od 0 do 180 stopni, ale może wzrosnąć do 210 stopni, w zależności od produkcji. Ten stopień obrotu można kontrolować, stosując Impuls Elektryczny o odpowiedniej szerokości, do sworznia sterującego. Serwo sprawdza puls co 20 milisekund. Impuls o szerokości 1 ms (1 milisekunda) może obracać serwo do 0 stopni, 1. ,5ms może obracać się do 90 stopni (pozycja neutralna), a impuls 2 ms może obracać go do 180 stopni.
wszystkie serwosilniki współpracują bezpośrednio z szynami zasilającymi +5V, ale musimy uważać na ilość prądu, jaką zużywa silnik, jeśli planujesz użyć więcej niż dwóch serwosilników, należy zaprojektować odpowiednią osłonę serwo.,
aby dowiedzieć się więcej o zasadzie działania serwomotoru i praktycznych zastosowaniach, sprawdź poniższe aplikacje, w których sterowanie serwomotorem jest wyjaśnione na przykładach:
- Obwód testera serwomotoru
- silnik serwo współpracujący z mikrokontrolerem 8051
- sterowanie serwomotorem za pomocą Arduino
- sterowanie serwomotorem z czujnikiem Flex
- Raspberry Pi servo motor tutorial