o que é um Servo Motor?
um motor servo é um tipo de motor que pode rodar com grande precisão. Normalmente este tipo de motor consiste em um circuito de controle que fornece feedback sobre a posição atual do eixo do motor, Este feedback permite que os motores servo para rodar com grande precisão. Se você quiser rodar um objeto em alguns ângulos específicos ou distância, então você usa um motor servo. Trata-se apenas de um motor simples que passa por um mecanismo de servo., Se o motor é alimentado por uma fonte de alimentação DC, então ele é chamado DC servo motor, e se ele é motor AC-powered então ele é chamado de AC servo motor. Para este tutorial, vamos discutir apenas sobre o serviço motor de DC trabalho. Além destas grandes classificações, existem muitos outros tipos de servomotores baseados no tipo de arranjo de engrenagens e características operacionais. Um motor servo geralmente vem com um arranjo de engrenagens que nos permite obter um motor servo torque muito alto em pacotes pequenos e leves., Devido a essas características, eles estão sendo usados em muitas aplicações como carro de brinquedo, helicópteros RC e aviões, robótica, etc.
os motores Servo são classificados em kg/cm (quilograma por centímetro) a maioria dos motores de servo hobby são classificados em 3kg/cm ou 6kg/cm ou 12kg / cm. Este kg / cm diz-lhe quanto peso o seu motor de servo pode levantar a uma determinada distância. Por exemplo: um motor Servo de 6kg/cm deve ser capaz de levantar 6kg se a carga estiver suspensa a 1cm do eixo do motor, quanto maior a distância menor a capacidade de carga., A posição de um motor servo é decidida por impulso elétrico e seu circuito é colocado ao lado do motor.
Motor de Servo Mecanismo de Trabalho
É composto de três partes:
- dispositivo Controlado
- sensor de Saída
- sistema de Feedback
é um sistema de ciclo fechado, onde ele usa um feedback positivo do sistema para controle de movimento e a posição final do eixo. Aqui o dispositivo é controlado por um sinal de feedback gerado pela comparação do sinal de saída e sinal de entrada de referência.,
aqui o sinal de entrada de referência é comparado com o sinal de saída de referência e o terceiro sinal é produzido pelo sistema de feedback. E este terceiro sinal atua como um sinal de entrada para o controle do dispositivo. Este sinal está presente enquanto o sinal de feedback é gerado ou há uma diferença entre o sinal de entrada de referência e o sinal de saída de referência. Assim, a principal tarefa do servomecanismo é manter a saída de um sistema no valor desejado na presença de ruídos.,um servo é constituído por um Motor (DC ou CA), um potenciómetro, um conjunto de engrenagens e um circuito de comando. Em primeiro lugar, usamos montagem de engrenagens para reduzir RPM e aumentar o torque do motor. Digamos que na posição inicial do eixo motor servo, a posição do botão potenciômetro é tal que não há sinal elétrico gerado na porta de saída do potenciômetro. Agora um sinal elétrico é dado a outro terminal de entrada do amplificador do detector de erros., Agora a diferença entre estes dois sinais, um vem do potenciômetro e outro vem de outras fontes, será processado em um mecanismo de feedback e a saída será fornecida em termos de sinal de erro. Este sinal de erro atua como a entrada para motor e motor começa a rodar. Agora o eixo motor Está ligado com o potenciômetro e à medida que o motor gira de modo que o potenciômetro e ele irá gerar um sinal. Assim, à medida que a posição angular do potenciômetro muda, seu sinal de retorno de saída muda., Depois de algum tempo a posição do potenciômetro atinge uma posição que a saída do potenciômetro é a mesma que o sinal externo fornecido. Nesta condição, não haverá sinal de saída do amplificador para a entrada do motor, uma vez que não há diferença entre o sinal externo aplicado e o sinal gerado no potenciômetro, e nesta situação o motor pára de rodar.motor de Servo de interfaceamento com microcontroladores:
motor de Servo de interfaceamento como motor de S90 servo com MCU é muito fácil. Os Servos têm três fios a sair deles., Dos quais dois serão usados para o fornecimento (positivo e negativo) e um será usado para o sinal que deve ser enviado a partir da MCU. Um MG995 Metal Gear Servo Motor, que é mais comumente usado para rc carros humanóides bots etc. A imagem do MG995 é mostrada abaixo:

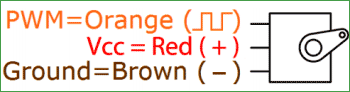
o código de cores do seu servo motor pode diferir, por isso verifique a sua respectiva ficha.,todos os motores de servo trabalham diretamente com os seus carris de alimentação +5V, mas temos de ter cuidado com a quantidade de corrente que o motor consumiria se você estiver planejando usar mais de dois servomotores um escudo servo apropriado deve ser projetado. motor de Servo-comando: todos os motores têm três fios a sair. Dos quais dois serão usados para o fornecimento (positivo e negativo) e um será usado para o sinal que deve ser enviado a partir da MCU.
Servo motor é controlado por PWM (pulso com modulação) que é fornecido pelos fios de controle., Há um pulso mínimo, um pulso máximo e uma taxa de repetição. O motor Servo pode girar 90 graus a partir de qualquer direção forma sua posição neutra. O motor servo espera ver um pulso a cada 20 milisegundos (ms) e o comprimento do pulso irá determinar a distância que o motor gira. Por exemplo, um pulso de 1,5 ms fará com que o motor vire para a posição de 90°, como se o pulso é mais curto do que 1,5 ms shaft se move para 0° e se for mais longo do que 1,5 ms do que ele vai transformar o servo para 180°.,
Servo motor funciona no princípio PWM (modulação de largura de pulso), significa que seu ângulo de rotação é controlado pela duração do pulso aplicado ao seu pino de controle. Basicamente, o servo motor é feito de motor de corrente contínua, que é controlado por um resistor variável (potenciômetro) e algumas engrenagens. A força de alta velocidade do motor de corrente contínua é convertida em torque por engrenagens. Nós sabemos que o trabalho = força X Distância, em DC força motora é menor e distância (velocidade) é alta e em Servo, força é alta e distância é menor., O potenciômetro é ligado ao eixo de saída do Servo, para calcular o ângulo e parar o motor de corrente contínua no ângulo requerido.

Servo motor pode ser rodado de 0 a 180 graus, mas pode ir até 210 graus, dependendo da fabricação. Este grau de rotação pode ser controlado aplicando o pulso elétrico de largura adequada, ao seu pino de controle. O Servo verifica o pulso a cada 20 milisegundos. O pulso de 1 ms (1 milissegundo) de largura pode rodar o servo para 0 graus, 1.,5ms pode rodar para 90 graus (posição neutra) e pulso de 2 ms pode rodar para 180 graus. todos os motores de servo trabalham diretamente com os seus carris de alimentação +5V, mas temos de ter cuidado com a quantidade de corrente que o motor consumiria se você estiver planejando usar mais de dois servomotores um escudo servo apropriado deve ser projetado.,
Para saber mais sobre o servo motor princípio de funcionamento e aplicações práticas, por favor, confira abaixo aplicações onde o controle do servo motor é explicado com exemplos:
- Servo motor testador circuito
- Servo motor, a interface com o microcontrolador 8051
- Servo motor de controle usando Arduino
- controle de Servo com o Arduino Due
- Servo Controle com Sensor flexível
- Raspberry Pi Servo Motor Tutorial