ce este un servomotor?
un servomotor este un tip de motor care se poate roti cu mare precizie. În mod normal, acest tip de motor constă dintr-un circuit de control care oferă feedback cu privire la poziția curentă a arborelui motorului, acest feedback permite servomotoarelor să se rotească cu mare precizie. Dacă doriți să rotiți un obiect la anumite unghiuri sau distanțe specifice, atunci utilizați un servomotor. Este doar alcătuit dintr-un motor simplu care trece printr-un mecanism servo., Dacă motorul este alimentat de o sursă de alimentare cu curent continuu, atunci se numește servomotor DC, iar dacă este motor alimentat cu curent alternativ, atunci se numește servomotor AC. Pentru acest tutorial, vom discuta doar despre funcționarea servomotorului DC. În afară de aceste clasificări majore, există multe alte tipuri de servomotoare bazate pe tipul de dispunere a angrenajelor și caracteristicile de funcționare. Un servomotor vine de obicei cu un aranjament de viteze care ne permite să obținem un servomotor cu cuplu foarte mare în pachete mici și ușoare., Datorită acestor caracteristici, acestea sunt utilizate în multe aplicații, cum ar fi masina de jucărie, elicoptere RC și avioane, Robotica, etc.
servomotoarele sunt evaluate în kg / cm (kilogram pe centimetru) majoritatea servomotoarelor hobby sunt evaluate la 3kg/cm sau 6kg/cm sau 12kg/cm. Acest kg / cm vă spune cât de multă greutate poate ridica servomotorul dvs. la o anumită distanță. De exemplu: un servomotor de 6 kg/cm ar trebui să poată ridica 6 kg dacă sarcina este suspendată la 1 cm distanță de arborele motoarelor, cu atât este mai mare distanța, cu atât este mai mică capacitatea de încărcare a greutății., Poziția unui servomotor este decisă prin impuls electric, iar circuitele sale sunt plasate lângă motor.
mecanism de lucru Servomotor
Se compune din trei părți:
- dispozitiv controlat
- senzor de ieșire
- sistem de Feedback
este un sistem cu buclă închisă în care utilizează un sistem de feedback pozitiv pentru a controla mișcarea și poziția finală a arborelui. Aici dispozitivul este controlat de un semnal de feedback generat prin compararea semnalului de ieșire și a semnalului de intrare de referință.,aici semnalul de intrare de referință este comparat cu semnalul de ieșire de referință, iar al treilea semnal este produs de sistemul de feedback. Și acest al treilea semnal acționează ca un semnal de intrare pentru controlul dispozitivului. Acest semnal este prezent atât timp cât semnalul de feedback este generat sau există o diferență între semnalul de intrare de referință și semnalul de ieșire de referință. Deci, sarcina principală a servomecanismului este de a menține ieșirea unui sistem la valoarea dorită în prezența zgomotelor.,
principiul de lucru al servomotorului
un servo constă dintr-un Motor (DC sau AC), un potențiometru, un ansamblu de angrenaje și un circuit de control. În primul rând, folosim ansamblul angrenajului pentru a reduce RPM și pentru a crește cuplul motorului. Spune la poziția inițială a arborelui servomotor, poziția butonului potențiometrului este de așa natură încât nu există semnal electric generat la portul de ieșire al potențiometrului. Acum, un semnal electric este dat unui alt terminal de intrare al amplificatorului detectorului de erori., Acum, diferența dintre aceste două semnale, unul vine de la potențiometru și altul vine din alte surse, vor fi procesate într-un mecanism de feedback și de ieșire vor fi furnizate în ceea ce privește semnalul de eroare. Acest semnal de eroare acționează ca intrare pentru motor și motorul începe să se rotească. Acum arborele motorului este conectat cu potențiometrul și pe măsură ce motorul se rotește, astfel încât potențiometrul și va genera un semnal. Deci, pe măsură ce potențiometrul se schimbă poziția unghiulară, semnalul său de feedback de ieșire se schimbă., După cândva poziția potențiometrului ajunge într-o poziție în care ieșirea potențiometrului este aceeași cu semnalul extern furnizat. În această condiție, nu va exista semnal de ieșire de la amplificator la intrarea motorului, deoarece nu există nicio diferență între semnalul aplicat extern și semnalul generat la potențiometru, iar în această situație motorul nu se mai rotește.
interfațarea servomotoarelor cu microcontrolere:
interfațarea servomotoarelor hobby precum servomotorul S90 cu MCU este foarte ușoară. Servo-urile au trei fire care ies din ele., Din care două vor fi utilizate pentru aprovizionare (pozitive și negative) și unul va fi utilizat pentru semnalul care urmează să fie trimis de la MCU. Un servomotor cu angrenaj metalic Mg995, care este cel mai frecvent utilizat pentru mașinile RC roboți umanoizi etc. Imaginea de MG995 este prezentat mai jos:

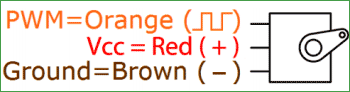
culoare de codificare de servo motor s-ar putea să difere prin urmare, verificați pentru datele respective datasheet.,
toate servomotoarele funcționează direct cu șinele de alimentare +5V, dar trebuie să fim atenți la cantitatea de curent pe care motorul ar consuma-o dacă intenționați să utilizați mai mult de două servomotoare, ar trebui proiectat un servo shield adecvat.
controlul servomotorului:
toate motoarele au trei fire care ies din ele. Din care două vor fi utilizate pentru aprovizionare (pozitive și negative) și unul va fi utilizat pentru semnalul care urmează să fie trimis de la MCU.
servomotorul este controlat de PWM (puls cu modulare) care este furnizat de firele de control., Există un impuls minim, un impuls maxim și o rată de repetare. Servo motor poate transforma 90 de grade din orice direcție forma poziția sa neutră. Servomotorul se așteaptă să vadă un impuls la fiecare 20 de milisecunde (ms), iar lungimea impulsului va determina cât de departe se întoarce motorul. De exemplu, un impuls de 1,5 ms va face ca motorul să se întoarcă în poziția de 90°, cum ar fi dacă impulsul este mai scurt decât arborele de 1,5 ms se deplasează la 0° și dacă este mai lung de 1,5 ms decât va transforma servo-ul la 180°.,
servomotorul funcționează pe principiul PWM (modulația lățimii impulsului), înseamnă că unghiul său de rotație este controlat de durata impulsului aplicat pinului său de Control. Practic servo motor este alcătuit din motor de curent continuu, care este controlat de un rezistor variabil (potențiometru) și unele unelte. Forța de mare viteză a motorului DC este transformată în cuplu prin angrenaje. Știm că munca= forța X distanța, în forța motorului DC este mai mică și distanța (viteza) este ridicată, iar în Servo, forța este mare și distanța este mai mică., Potențiometrul este conectat la arborele de ieșire al Servo-ului, pentru a calcula unghiul și a opri motorul DC pe unghiul necesar.

servomotorul poate fi rotit de la 0 la 180 de grade, dar poate merge până la 210 grade, în funcție de fabricație. Acest grad de rotație poate fi controlat prin aplicarea impulsului electric de lățime corespunzătoare, la pinul său de Control. Servo verifică pulsul la fiecare 20 de milisecunde. Pulsul de 1 ms (1 milisecundă) lățime poate roti servo la 0 grade, 1.,5ms se poate roti la 90 de grade (poziție neutră) și 2 ms puls se poate roti la 180 de grade.
toate servomotoarele funcționează direct cu șinele de alimentare +5V, dar trebuie să fim atenți la cantitatea de curent pe care motorul ar consuma-o dacă intenționați să utilizați mai mult de două servomotoare, ar trebui proiectat un servo shield adecvat.,
Pentru a afla mai multe despre motor servo principiul de funcționare și utilizări practice, vă rugăm să verificați de mai jos aplicații în cazul în care controlul de servo motor este explicat cu exemple:
- Servo motor tester de circuit
- Servo motor de interfațare cu microcontroler 8051
- Servo motor control folosind Arduino
- Servo control cu Arduino Due
- Servo Control cu Flex Senzor
- Raspberry Pi Servo Motor Tutorial