Was ist ein Servomotor?
Ein Servomotor ist ein Motortyp, der sich mit großer Präzision drehen kann. Normalerweise besteht dieser Motortyp aus einer Steuerschaltung, die eine Rückmeldung über die aktuelle Position der Motorwelle gibt, diese Rückmeldung ermöglicht es den Servomotoren, sich mit großer Präzision zu drehen. Wenn Sie ein Objekt in bestimmten Winkeln oder Entfernungen drehen möchten, verwenden Sie einen Servomotor. Es besteht nur aus einem einfachen Motor, der durch einen Servomechanismus läuft., Wenn der Motor von einer Gleichstromversorgung angetrieben wird, wird er als Gleichstrom-Servomotor bezeichnet, und wenn es sich um einen Wechselstrommotor handelt, wird er als Wechselstrommotor bezeichnet. Für dieses Tutorial werden wir nur über den DC-Servomotor diskutieren. Abgesehen von diesen Hauptklassifikationen gibt es viele andere Arten von Servomotoren, die auf der Art der Zahnradanordnung und den Betriebseigenschaften basieren. Ein Servomotor wird normalerweise mit einer Getriebeanordnung geliefert, die es uns ermöglicht, einen Servomotor mit sehr hohem Drehmoment in kleinen und leichten Gehäusen zu erhalten., Aufgrund dieser Eigenschaften werden sie in vielen Anwendungen wie Spielzeugautos, RC-Hubschraubern und-flugzeugen, Robotik usw. verwendet.
Servo motoren sind bewertet in kg/cm (kilogramm pro zentimeter) die meisten hobby servo motoren sind bewertet bei 3 kg/cm oder 6 kg/cm oder 12 kg/cm. Dieses kg / cm gibt an, wie viel Gewicht Ihr Servomotor in einer bestimmten Entfernung heben kann. Zum Beispiel: Ein 6kg / cm Servomotor sollte in der Lage sein, 6kg anzuheben, wenn die Last 1cm von der Motorwelle entfernt aufgehängt wird, je größer der Abstand, desto geringer die Gewichtsträgerkapazität., Die Position eines Servomotors wird durch elektrischen Impuls bestimmt und seine Schaltung wird neben dem Motor platziert.
Servomotorarbeitsmechanismus
Es besteht aus drei Teilen:
- Gesteuertes Gerät
- Ausgangssensor
- Rückkopplungssystem
Es ist ein geschlossenes System, bei dem es ein positives Rückkopplungssystem zur Steuerung der Bewegung und der Endposition der Welle verwendet. Hier wird das Gerät durch ein Rückkopplungssignal gesteuert, das durch Vergleich von Ausgangssignal und Referenzeingangssignal erzeugt wird.,
Hier wird das Referenzeingangssignal mit dem Referenzausgangssignal verglichen und das dritte Signal wird vom Rückkopplungssystem erzeugt. Und dieses dritte Signal fungiert als Eingangssignal zur Steuerung des Gerätes. Dieses Signal ist vorhanden, solange das Rückkopplungssignal erzeugt wird oder es einen Unterschied zwischen dem Referenzeingangssignal und dem Referenzausgangssignal gibt. Die Hauptaufgabe des Servomechanismus besteht also darin, die Ausgabe eines Systems bei Vorhandensein von Geräuschen auf dem gewünschten Wert zu halten.,
Servomotor Arbeitsprinzip
Ein Servo besteht aus einem Motor (DC oder AC), einem Potentiometer, einer Getriebebaugruppe und einer Steuerschaltung. Zunächst verwenden wir die Getriebebaugruppe, um die Drehzahl zu reduzieren und das Drehmoment des Motors zu erhöhen. Angenommen, an der Anfangsposition der Servomotorwelle ist die Position des Potentiometerknopfes so, dass am Ausgangsport des Potentiometers kein elektrisches Signal erzeugt wird. Nun wird ein elektrisches Signal an eine andere Eingangsklemme des Fehlerdetektorverstärkers gegeben., Nun wird der Unterschied zwischen diesen beiden Signalen, eines kommt vom Potentiometer und ein anderes kommt von anderen Quellen, in einem Rückkopplungsmechanismus verarbeitet und Ausgang wird in Bezug auf Fehlersignal zur Verfügung gestellt werden. Dieses Fehlersignal fungiert als Eingang für Motor und Motor beginnt sich zu drehen. Jetzt Motorwelle ist mit dem Potentiometer verbunden und wie der Motor dreht sich so das Potentiometer und es wird ein Signal erzeugen. Wenn sich also die Winkelposition des Potentiometers ändert, ändert sich sein Ausgangsrückkopplungssignal., Nach irgendwann die position von potentiometer erreicht an einer position, dass der ausgang von potentiometer ist gleiche wie externe signal zur verfügung gestellt. In diesem Zustand wird es kein Ausgangssignal vom Verstärker zum Motoreingang geben, da es keinen Unterschied zwischen dem angelegten Signal und dem am Potentiometer erzeugten Signal gibt, und in dieser Situation hört der Motor auf zu rotieren.
Schnittstelle Servomotoren mit Mikrocontrollern:
Schnittstelle hobby servomotoren wie s90 servomotor mit MCU ist sehr einfach. Servos haben drei Drähte aus ihnen kommen., Von denen zwei für die Versorgung (positiv und negativ) und einer für das Signal verwendet werden, das von der MCU gesendet werden soll. Eine MG995 Metall Getriebe Servo Motor, die ist am häufigsten verwendet für RC autos humanoiden bots etc. Das bild von MG995 ist unten gezeigt:

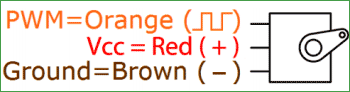
Die farbe codierung von ihre servo motor könnte unterscheiden daher überprüfen für ihre jeweiligen datenblatt.,
Alle Servomotoren arbeiten direkt mit Ihren + 5V Versorgungsschienen, aber wir müssen vorsichtig mit der Strommenge sein, die der Motor verbrauchen würde, wenn Sie planen, mehr als zwei Servomotoren zu verwenden, sollte ein geeigneter Servoschutz ausgelegt sein.
Steuerung Servomotor:
Alle Motoren haben drei Drähte aus ihnen kommen. Von denen zwei für die Versorgung (positiv und negativ) und einer für das Signal verwendet werden, das von der MCU gesendet werden soll.
Servo motor ist gesteuert durch PWM (Puls mit Modulation), die ist zur verfügung gestellt durch die control drähte., Es gibt einen minimalen Puls, einen maximalen Puls und eine Wiederholungsrate. Servomotor kann 90 Grad von beiden Richtungen in seine neutrale Position drehen. Der Servomotor erwartet alle 20 Millisekunden (ms) einen Impuls und die Länge des Impulses bestimmt, wie weit sich der Motor dreht. Zum Beispiel wird ein 1,5-ms-Impuls den Motor in die 90° – Position drehen lassen, z. B. wenn der Impuls kürzer als 1,5 ms ist, bewegt sich die Welle auf 0° und wenn er länger als 1,5 ms ist, wird das Servo auf 180°gedreht.,
Servo motor arbeitet auf PWM (Pulse width modulation) prinzip, bedeutet seine drehwinkel ist gesteuert durch die dauer der angewendet puls zu seine Control PIN. Grundsätzlich Servomotor besteht aus DC-Motor, der durch einen variablen Widerstand (Potentiometer) und einige Zahnräder gesteuert wird. Die Hochgeschwindigkeitskraft des Gleichstrommotors wird durch Zahnräder in Drehmoment umgewandelt. Wir wissen, dass ARBEIT= KRAFT X ABSTAND, in DC motor Kraft ist weniger und abstand (geschwindigkeit) ist hoch und in Servo, kraft ist Hoch und abstand ist weniger., Das Potentiometer ist mit der Ausgangswelle des Servos verbunden, um den Winkel zu berechnen und den Gleichstrommotor auf dem erforderlichen Winkel anzuhalten.

Servo-motor kann gedreht werden von 0 zu 180 Grad, aber es kann gehen bis zu 210 Grad, je nach Herstellung. Dieser Rotationsgrad kann durch Anlegen des elektrischen Impulses der richtigen Breite an seinen Steuerstift gesteuert werden. Servo überprüft den Puls alle 20 Millisekunden. Der puls von 1 ms (1 millisekunde) breite kann drehen die servo zu 0 grad, 1.,5 ms können drehen zu 90 grad (neutral position) und 2 ms puls kann drehen es zu 180 grad.
Alle Servomotoren arbeiten direkt mit Ihren + 5V-Versorgungsschienen, aber wir müssen vorsichtig sein, wie viel Strom der Motor verbrauchen würde, wenn Sie planen, mehr als zwei Servomotoren zu verwenden, sollte ein geeigneter Servoschutz entwickelt werden.,
Um mehr über servo motor arbeits prinzip und praktische anwendungen, überprüfen sie bitte unten anwendungen wo steuerung von servo motor ist erklärt mit die beispiele:
- Servo motor tester schaltung
- Servo motor schnittstelle mit 8051 mikrocontroller
- Servo motor control mit Arduino
- Servo control mit Arduino Due
- Servo Control mit Flex Sensor
- Raspberry Pi Servo Motor Tutorial