Che cosa è un servomotore?
Un servomotore è un tipo di motore che può ruotare con grande precisione. Normalmente questo tipo di motore è costituito da un circuito di controllo che fornisce un feedback sulla posizione corrente dell’albero motore, questo feedback consente ai servomotori di ruotare con grande precisione. Se si desidera ruotare un oggetto ad alcuni angoli specifici o distanza, quindi si utilizza un servomotore. È costituito da un semplice motore che attraversa un meccanismo servo., Se il motore è alimentato da un alimentatore CC, viene chiamato servomotore CC e, se è alimentato a corrente alternata, viene chiamato servomotore CA. Per questo tutorial, discuteremo solo del funzionamento del servomotore DC. Oltre a queste principali classificazioni, ci sono molti altri tipi di servomotori in base al tipo di disposizione degli ingranaggi e alle caratteristiche operative. Un servomotore di solito viene fornito con una disposizione degli ingranaggi che ci consente di ottenere un servomotore a coppia molto elevata in pacchetti piccoli e leggeri., A causa di queste caratteristiche, vengono utilizzati in molte applicazioni come auto giocattolo, elicotteri RC e aerei, robotica, ecc.
I servomotori sono valutati in kg / cm (chilogrammo per centimetro) la maggior parte dei servomotori hobby sono valutati a 3kg/cm o 6kg/cm o 12kg/cm. Questo kg / cm ti dice quanto peso il tuo servomotore può sollevare a una particolare distanza. Ad esempio: un servomotore da 6 kg/cm dovrebbe essere in grado di sollevare 6 kg se il carico è sospeso a 1 cm dall’albero del motore, maggiore è la distanza minore è la capacità di carico del peso., La posizione di un servomotore è decisa da un impulso elettrico e la sua circuiteria è posizionata accanto al motore.
Meccanismo di funzionamento del servomotore
Si compone di tre parti:
- Dispositivo controllato
- Sensore di uscita
- Sistema di feedback
È un sistema a circuito chiuso in cui utilizza un sistema di feedback positivo per controllare il movimento e la posizione finale dell’albero. Qui il dispositivo è controllato da un segnale di retroazione generato confrontando segnale di uscita e segnale di ingresso di riferimento.,
Qui il segnale di ingresso di riferimento viene confrontato con il segnale di uscita di riferimento e il terzo segnale viene prodotto dal sistema di feedback. E questo terzo segnale funge da segnale di ingresso per il controllo del dispositivo. Questo segnale è presente finché viene generato il segnale di retroazione o c’è una differenza tra il segnale di ingresso di riferimento e il segnale di uscita di riferimento. Quindi il compito principale del servomeccanismo è mantenere l’output di un sistema al valore desiderato in presenza di rumori.,
Principio di funzionamento del servomotore
Un servo è costituito da un motore (DC o AC), un potenziometro, gruppo ingranaggi e un circuito di controllo. Prima di tutto, usiamo il gruppo ingranaggi per ridurre i giri e per aumentare la coppia del motore. Dire alla posizione iniziale dell’albero del servomotore, la posizione della manopola del potenziometro è tale che non vi è alcun segnale elettrico generato alla porta di uscita del potenziometro. Ora viene dato un segnale elettrico a un altro terminale di ingresso dell’amplificatore del rilevatore di errori., Ora la differenza tra questi due segnali, uno proviene dal potenziometro e un altro proviene da altre fonti, verrà elaborato in un meccanismo di feedback e l’uscita verrà fornita in termini di segnale di errore. Questo segnale di errore funge da ingresso per il motore e il motore inizia a ruotare. Ora albero motore è collegato con il potenziometro e come il motore ruota in modo che il potenziometro e genererà un segnale. Così come la posizione angolare del potenziometro cambia, il suo segnale di feedback di uscita cambia., Dopo qualche tempo la posizione del potenziometro raggiunge in una posizione che l’uscita del potenziometro è lo stesso come segnale esterno fornito. In questa condizione, non ci sarà alcun segnale di uscita dall’amplificatore all’ingresso del motore in quanto non vi è alcuna differenza tra il segnale esterno applicato e il segnale generato al potenziometro, e in questa situazione il motore smette di ruotare.
Interfacciamento servomotori con microcontrollori:
Interfacciamento servomotori hobby come servomotore s90 con MCU è molto facile. I servi hanno tre fili che escono da loro., Di cui due saranno utilizzati per l’alimentazione (positivo e negativo) e uno sarà utilizzato per il segnale che deve essere inviato dal MCU. Un servomotore MG995 Metal Gear che è più comunemente usato per auto RC robot umanoidi ecc. L’immagine di MG995 è mostrato di seguito:

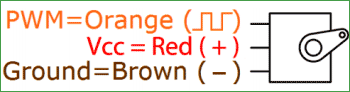
La codifica a colori del vostro servomotore potrebbe differire quindi controllare per il vostro rispettivo scheda tecnica.,
Tutti i servomotori funzionano direttamente con le rotaie di alimentazione +5V, ma dobbiamo stare attenti alla quantità di corrente che il motore consumerebbe se si prevede di utilizzare più di due servomotori dovrebbe essere progettato un servo scudo adeguato.
Servomotore di controllo:
Tutti i motori hanno tre fili che escono da loro. Di cui due saranno utilizzati per l’alimentazione (positivo e negativo) e uno sarà utilizzato per il segnale che deve essere inviato dal MCU.
Il servomotore è controllato da PWM (impulso con modulazione) che è fornito dai cavi di controllo., C’è un impulso minimo, un impulso massimo e una frequenza di ripetizione. Servomotore può girare di 90 gradi da entrambe le direzioni forma la sua posizione neutra. Il servomotore si aspetta di vedere un impulso ogni 20 millisecondi (ms) e la lunghezza dell’impulso determinerà fino a che punto gira il motore. Ad esempio, un impulso di 1,5 ms farà ruotare il motore nella posizione di 90°, ad esempio se l’impulso è più corto di 1,5 ms l’albero si sposta a 0° e se è più lungo di 1,5 ms rispetto a quello che girerà il servo a 180°.,
Il servomotore funziona sul principio PWM (Pulse width modulation), significa che il suo angolo di rotazione è controllato dalla durata dell’impulso applicato al suo PIN di controllo. Fondamentalmente servomotore è costituito da motore a corrente continua che è controllato da un resistore variabile (potenziometro) e alcuni ingranaggi. La forza ad alta velocità del motore a corrente continua viene convertita in coppia dagli ingranaggi. Sappiamo che IL LAVORO = FORZA X DISTANZA, in forza del motore di CC è di meno e la distanza (velocità) è alta e in servo, la forza è alta e la distanza è di meno., Il potenziometro è collegato all’albero di uscita del servo, per calcolare l’angolo e fermare il motore DC sull’angolo richiesto.

Il servomotore può essere ruotato da 0 a 180 gradi, ma può arrivare fino a 210 gradi, a seconda della produzione. Questo grado di rotazione può essere controllato applicando l’impulso elettrico di larghezza adeguata, al suo perno di controllo. Servo controlla l’impulso in ogni 20 millisecondi. L’impulso di 1 ms (1 millisecondo) larghezza può ruotare il servo a 0 gradi, 1.,5 ms può ruotare a 90 gradi (posizione neutra) e 2 ms impulso può ruotare a 180 gradi.
Tutti i servomotori funzionano direttamente con le rotaie di alimentazione +5V, ma dobbiamo stare attenti alla quantità di corrente che il motore consumerebbe se si prevede di utilizzare più di due servomotori dovrebbe essere progettato un servo scudo adeguato.,
Per saperne di più su un motore servo principio di funzionamento e applicazioni pratiche, si prega di controllare sotto applicazioni dove il controllo del servomotore è spiegato anche con gli esempi:
- motore Servo tester di circuito
- Servo motore interfacciamento con microcontrollore 8051
- Servo controllo del motore utilizzando Arduino
- Servo controllo con Arduino due
- Servo Control con Flex Sensore
- Raspberry Pi Servo Motore Tutorial