Wat is een servomotor?
een servomotor is een type motor dat met grote precisie kan roteren. Normaal gesproken bestaat dit type motor uit een stuurcircuit dat feedback geeft over de huidige positie van de motoras, deze feedback laat de servomotoren met grote precisie roteren. Als u een object wilt draaien op een aantal specifieke hoeken of afstand, dan gebruik je een servomotor. Het is gewoon opgebouwd uit een eenvoudige motor die door een servomechanisme loopt., Als de motor wordt aangedreven door een DC-voeding dan wordt het DC-servomotor genoemd, en als het AC-aangedreven motor is, wordt het AC-servomotor genoemd. Voor deze zelfstudie bespreken we alleen over de DC-servomotor die werkt. Afgezien van deze belangrijke classificaties, zijn er vele andere soorten servomotoren op basis van het type tandwiel opstelling en bedrijfskenmerken. Een servomotor wordt meestal geleverd met een tandwielregeling waarmee we een servomotor met een zeer hoog koppel in kleine en lichtgewicht pakketten kunnen krijgen., Door deze functies worden ze gebruikt in vele toepassingen zoals speelgoedauto, rc helikopters en vliegtuigen, robotica, enz.
servomotoren worden beoordeeld in kg/cm (kilogram per centimeter) de meeste hobby servomotoren worden beoordeeld op 3kg/cm of 6kg/cm of 12kg / cm. Deze kg / cm vertelt u hoeveel gewicht uw servomotor op een bepaalde afstand kan tillen. Bijvoorbeeld: een 6kg / cm servomotor moet 6kg kunnen optillen als de belasting 1 cm van de motoras wordt opgehangen, hoe groter de afstand hoe kleiner het draagvermogen van het gewicht., De positie van een servomotor wordt bepaald door elektrische puls en het circuit wordt naast de motor geplaatst.
Servomotorwerkmechanisme
Het bestaat uit drie delen:
- gecontroleerd apparaat
- Uitgangssensor
- feedbacksysteem
het is een gesloten-lussysteem waarbij een positief feedbacksysteem wordt gebruikt om de beweging en de eindpositie van de as te regelen. Hier wordt het apparaat bestuurd door een feedbacksignaal gegenereerd door het vergelijken van uitgangssignaal en referentie-ingangssignaal.,
Hier wordt het referentie-ingangssignaal vergeleken met het referentie-uitgangssignaal en het derde signaal wordt geproduceerd door het feedbacksysteem. En dit derde signaal fungeert als een ingangssignaal aan de controle van het apparaat. Dit signaal is aanwezig zolang het feedbacksignaal wordt gegenereerd of er een verschil is tussen het referentie-ingangssignaal en het referentie-uitgangssignaal. Dus de belangrijkste taak van servomechanisme is om de output van een systeem te handhaven op de gewenste waarde bij aanwezigheid van geluiden.,
servomotor werkingsprincipe
een servomotor bestaat uit een Motor (DC of AC), een potentiometer, een tandwielassemblage en een regelcircuit. Allereerst gebruiken we tandwielassemblage om het toerental te verminderen en het koppel van de motor te verhogen. Zeg bij aanvankelijke positie van servomotorschacht, is de positie van de potentiometerknop zodanig dat er geen elektrisch signaal bij de outputhaven van de potentiometer wordt geproduceerd. Nu wordt een elektrisch signaal gegeven aan een andere ingang van de foutdetectorversterker., Nu zal het verschil tussen deze twee signalen, Een komt van de potentiometer en een andere komt van andere bronnen, worden verwerkt in een feedback mechanisme en de output zal worden verstrekt in termen van foutsignaal. Dit foutsignaal fungeert als de ingang voor de motor en de motor begint te roteren. Nu motor as is verbonden met de potentiometer en als de motor draait dus de potentiometer en het zal een signaal genereren. Dus als de hoekpositie van de potentiometer verandert, verandert het uitgangssignaal., Na ergens bereikt de positie van potentiometer bij een positie dat de output van potentiometer hetzelfde is als extern verstrekt signaal. Bij deze voorwaarde, zal er geen uitgangssignaal van de versterker aan de motoringang zijn aangezien er geen verschil tussen extern toegepast signaal en het signaal bij potentiometer wordt gegenereerd, en in deze situatie de motor stopt roterend.
interfacing servomotoren met Microcontrollers:
interfacing hobby servomotoren zoals s90 servomotor met MCU is zeer eenvoudig. Er komen drie draden uit de servo ‘ s., Waarvan er twee zullen worden gebruikt voor Levering (positief en negatief) en een zal worden gebruikt voor het signaal dat moet worden verzonden vanaf de MCU. Een MG995 de servomotor van het Metaaltoestel die het meest meestal voor rc-auto ‘ s humanoid bots enz.wordt gebruikt. De afbeelding van MG995 wordt hieronder getoond:

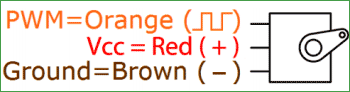
de kleurcodering van uw servomotor kan verschillen vandaar controleer voor uw respectievelijke datasheet.,
alle servomotoren werken direct met uw +5V-toevoerrails, maar we moeten voorzichtig zijn met de hoeveelheid stroom die de motor zou verbruiken als u van plan bent om meer dan twee servomotoren te gebruiken, moet er een goed servomotorschild worden ontworpen.
controlerende servomotor:
alle motoren hebben drie draden die eruit komen. Waarvan er twee zullen worden gebruikt voor Levering (positief en negatief) en een zal worden gebruikt voor het signaal dat moet worden verzonden vanaf de MCU.
servomotor wordt bestuurd door PWM (Pulse with Modulation) die wordt geleverd door de besturingsdraden., Er is een minimale puls, een maximale puls en een herhalingssnelheid. Servomotor kan 90 graden draaien uit beide richtingen en zijn neutrale positie vormen. De servomotor verwacht elke 20 milliseconden (ms) een puls te zien en de lengte van de puls zal bepalen hoe ver de motor draait. Bijvoorbeeld, zal een 1.5 ms-impuls de motor draaien aan de 90° positie, zoals als de impuls korter is dan 1.5 ms-schachtbewegingen aan 0° en als het langer is dan 1.5 ms dan zal het de servo aan 180°draaien.,
servomotor werkt volgens het PWM-Principe( Pulse width modulation), wat betekent dat de draaihoek wordt geregeld door de duur van de puls die op de stuurpen wordt aangebracht. In principe servomotor bestaat uit DC motor die wordt gecontroleerd door een variabele weerstand (potentiometer) en sommige toestellen. De hoge snelheidskracht van gelijkstroommotor wordt omgezet in koppel door tandwielen. We weten dat werk = kracht x Afstand, in DC motorkracht is minder en afstand (snelheid) is hoog en in Servo, kracht is hoog en afstand is minder., De potentiometer wordt verbonden met de outputschacht van de Servo, om de hoek te berekenen en de gelijkstroom-motor op de vereiste hoek te stoppen.

servomotor kan worden gedraaid van 0 naar 180 graden, maar kan oplopen tot 210 graden, afhankelijk van de productie. Deze mate van rotatie kan worden geregeld door de elektrische puls van de juiste breedte toe te passen, op de stuurpen. Servo controleert de puls in elke 20 milliseconden. De puls van 1 ms (1 milliseconde) breedte kan de servo draaien tot 0 graden, 1.,5ms kan aan 90 graden (neutrale positie) draaien en de impuls van 2 lidstaten kan het aan 180 graad draaien.
alle servomotoren werken direct met uw +5V-toevoerrails, maar we moeten voorzichtig zijn met de hoeveelheid stroom die de motor zou verbruiken als u van plan bent om meer dan twee servomotoren te gebruiken, moet er een goed servomotorschild worden ontworpen.,
om meer Te leren over de servo motor werkingsprincipe en praktische toepassingen, gelieve hieronder toepassingen waar het besturen van servo-motor wordt uitgelegd met voorbeelden:
- Servo motor circuit tester
- Servo motor verbinding met de 8051 microcontroller
- Servo motor control met behulp van Arduino
- Servo control met Arduino Due
- Servo Control met Flex Sensor
- Raspberry Pi Servo Motor Tutorial