Vad är en servomotor?
en servomotor är en typ av motor som kan rotera med stor precision. Normalt består denna typ av motor av en styrkrets som ger feedback på motoraxelns nuvarande position, med denna återkoppling kan servomotorerna rotera med stor precision. Om du vill rotera ett objekt i vissa specifika vinklar eller avstånd, använder du en servomotor. Det består bara av en enkel motor som går genom en servomekanism., Om motorn drivs av en DC strömförsörjning då det kallas DC servomotor, och om det är AC-drivna motorn då det kallas AC servomotor. För denna handledning kommer vi att diskutera endast om DC servomotorn fungerar. Bortsett från dessa stora klassificeringar, det finns många andra typer av servomotorer baserade på typ av redskap arrangemang och driftegenskaper. En servomotor levereras vanligtvis med ett redskap arrangemang som tillåter oss att få en mycket hög vridmoment servomotor i små och lätta paket., På grund av dessa funktioner används de i många applikationer som leksaksbil, RC-helikoptrar och flygplan, robotik etc.
servomotorer är klassade i kg/cm (kilogram per centimeter) de flesta hobby servomotorer är klassade på 3kg/cm eller 6kg/cm eller 12kg / cm. Denna kg / cm berättar hur mycket vikt din servomotor kan lyfta på ett visst avstånd. Till exempel: en 6kg/cm servomotor ska kunna lyfta 6kg om lasten är upphängd 1cm bort från motoraxeln, desto större avstånd desto mindre viktbärande kapacitet., Ställningen för en servomotor bestäms av elektrisk puls och dess kretsar placeras bredvid motorn.
servomotor arbetsmekanism
den består av tre delar:
- styrd enhet
- utgångssensor
- återkopplingssystem
det är ett slutet loop-system där det använder ett positivt återkopplingssystem för att styra rörelse och axelns slutliga position. Här styrs enheten av en återkopplingssignal som genereras genom att jämföra utgångssignal och referensinmatningssignal.,
här jämförs referensinmatningssignalen med referensutmatningssignalen och den tredje signalen produceras av återkopplingssystemet. Och den här tredje signalen fungerar som en ingångssignal till kontrollen av enheten. Denna signal är närvarande så länge återkopplingssignalen genereras eller det finns en skillnad mellan referensinmatningssignalen och referensutmatningssignalen. Så servomekanismens huvuduppgift är att upprätthålla produktionen av ett system vid önskat värde vid närvaro av ljud.,
servomotor arbetsprincip
en servo består av en Motor (DC eller AC), en potentiometer, växelmontering och en styrkrets. Först och främst använder vi växelmontering för att minska varvtalet och öka motorns vridmoment. Säg vid startpositionen för servomotoraxeln är potentiometerns knopp sådan att det inte finns någon elektrisk signal som genereras vid potentiometerns utgångsport. Nu ges en elektrisk signal till en annan ingång på feldetektorförstärkaren., Nu kommer skillnaden mellan dessa två signaler, en kommer från potentiometern och en annan kommer från andra källor, kommer att behandlas i en återkopplingsmekanism och utgången kommer att tillhandahållas när det gäller felsignal. Denna felsignal fungerar när ingången för motor och motor börjar rotera. Nu motoraxeln är ansluten med potentiometern och när motorn roterar så potentiometern och det kommer att generera en signal. Så när potentiometerns vinkelposition ändras ändras dess återkopplingssignal., Efter någon gång når potentiometerns position i ett läge att potentiometerns utgång är densamma som extern signal. Vid detta tillstånd kommer det inte att finnas någon utsignal från förstärkaren till motoringången eftersom det inte finns någon skillnad mellan extern applicerad signal och signalen som genereras vid potentiometer, och i denna situation stannar motorn att rotera.
Interfacing servomotorer med mikrokontroller:
Interfacing hobby servomotorer som S90 servomotor med MCU är mycket lätt. Servon har tre ledningar som kommer ut ur dem., Av vilka två kommer att användas för leverans (positiv och negativ) och en kommer att användas för den signal som ska skickas från MCU. En MG995 Metal Gear servomotor som oftast används för RC bilar humanoid bots etc. Bilden av MG995 visas nedan:

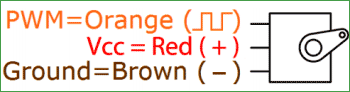
färgkodningen för din servomotor kan skilja sig, så kontrollera efter respektive datablad.,
alla servomotorer arbetar direkt med din + 5V försörjningsskenor men vi måste vara försiktiga med hur mycket ström motorn skulle förbruka om du planerar att använda mer än två servomotorer en riktig servomotor ska utformas.
styrning servomotor:
alla motorer har tre ledningar som kommer ut ur dem. Av vilka två kommer att användas för leverans (positiv och negativ) och en kommer att användas för den signal som ska skickas från MCU.
servomotorn styrs av PWM (puls med modulering) som tillhandahålls av styrkablarna., Det finns en minsta puls, en maximal puls och en repetitionshastighet. Servomotorn kan vrida 90 grader från endera riktningen bilda sin neutrala position. Servomotorn förväntar sig att se en puls varje 20 millisekunder (ms) och pulsens längd bestämmer hur långt motorn vänder. En 1,5 ms-puls gör till exempel att motorn vrids till 90° – läget, till exempel om pulsen är kortare än 1,5 ms-axeln rör sig till 0° och om den är längre än 1,5 ms än den kommer att vrida servo till 180°.,
servomotor fungerar på PWM-principen (pulsbreddsmodulering), betyder att dess rotationsvinkel styrs av varaktigheten av applicerad puls till dess styrpinne. I grund och botten servomotor består av likströmsmotor som styrs av ett variabelt motstånd (potentiometer) och vissa växlar. Hög hastighet kraft likströmsmotor omvandlas till vridmoment med växlar. Vi vet att arbete= kraft X avstånd, i DC motorkraften är mindre och avståndet (hastighet) är hög och i Servo, kraften är hög och avståndet är mindre., Potentiometern är ansluten till servoens utgående axel, för att beräkna vinkeln och stoppa likströmsmotorn på önskad vinkel.

servomotor kan roteras från 0 till 180 grader, men det kan gå upp till 210 grader, beroende på tillverkningen. Denna rotationsgrad kan styras genom att applicera den elektriska pulsen med rätt bredd, till dess styrstift. Servo kontrollerar pulsen i varje 20 millisekunder. Pulsen på 1 ms (1 millisekund) bredd kan rotera servo till 0 grader, 1.,5ms kan rotera till 90 grader (neutralt läge) och 2 ms puls kan rotera den till 180 grader.
alla servomotorer arbetar direkt med din + 5V försörjningsskenor men vi måste vara försiktiga med hur mycket ström motorn skulle förbruka om du planerar att använda mer än två servomotorer en riktig servomotor ska utformas.,
för att lära sig mer om servomotor arbetsprincip och praktiska användningsområden, kontrollera nedan applikationer där styrning av servomotor förklaras med exemplen:
- servomotor testerkrets
- servomotor interfacing med 8051 mikrokontroller
- Servomotorstyrning med Arduino
- Servomotorstyrning med Arduino Due
- Servomotorstyrning med Flex Sensor
- Raspberry Pi servomotor handledning